آموزش جامع PID بهصورت رایگان
مشاهده ویدئو آموزش PID در این مقاله به بررسی PID controller به صورت جامع و کاملا رایگان میپردازیم، با PID […]

مشاهده ویدئو آموزش PID
در این مقاله به بررسی PID controller به صورت جامع و کاملا رایگان میپردازیم، با PID سطح، PID دما و همچنین PID کنترلر به زبان ساده آشنا میشویم، کاربرد آن در پروژههای صنعتی را بررسی میکنیم و در آخر انواع روش های کنترلی ، تاثیر ضرایب مختلف بر فرایند و نحوه تنظیم آنها، برنامه نویسی PID و … را مورد برررسی قرار میدهیم، با نیک صنعت همراه باشید.
PID چیست
PID مخفف Integral-Derivative controller Propotional- است و فوق العاده در صنعت کابرد دارد. در اصل یک کنترل به صورت پیوسته است که بسیار دقیق و پایدار عمل میکند. هدف در PID برابر شدن مقدار PV با SP است یا حداقل خطا است. PID کنترلر در واقع یک سیستم بر اساس فیدبک است، در ادامه به آموزش PID به صورت تخصصی میپردازیم.
PID سطح و دما چیست
در PID سطح یا دما باید ضرایب P , I , D تنظیم شود. هر کدام از این ضرایب تاثیری خاصی در سیستم دارد. تنظیم این ضرایب کاملا به صورت تجربی است و طی چندین بار تمرین می توانید به راحتی ضرایب متناسب با سیستم را پیدا کنید.
نحوه عملکرد PID را میتوان به این صورت تعریف کرد که مقدار حال حاضر از طریق سنسوری اندازه گیری می شود و با مقدار SETPOINT که ما تعیین میکنیم مقایسه میکند و ضرایب P ,I , D و فرمول آن مقدار PV را به SP میرساند. در این ویدیو مقدار ST را 100 تعیین کردیم و همانطور که مشاهده کردید با مقایسه PV و SP مقدار ما شروع به افزایش کرد و در مقدار 100، سطح مایع نگه داشته شده است. شما در این ویدیو به آموزش PID سطح و نحوه برنامه نویسی PID به کمکPLC و نحوه سیمکشی آن به طور کامل آشنا میشوید.
PID کنترلر چیست
مخفف عبارت proportional (تناسبی) integral (انتگرال) derivative (مشتق) میباشد. pid از طریق فیدبک میتواند وضعیت لحظه ای سیستم را به کنترلر ارسال کند و به دقیق ترین حالت ممکن خروجی را کنترل کند تا در ایدآل ترین حالت ممکن باشد. Pid controller از جمله پایدار ترین و دقیق ترین سیستم های کنترلی محسوب میشود.
در تمامی پروژه های PID ، نیاز داریم سیستم در یک نقطه مطلوب ثابت بماند.برای این همین باید با مفهموم این کنترلر کامل آشنا شده و آن را درک کنید. با آموزش PLC میتوانید با انواع سیستمهای کنترلی آشنا شوید تا بتوانید به درک بهتری در آموزش PID کنترلر برسید.
انواع سیستم های کنترلی
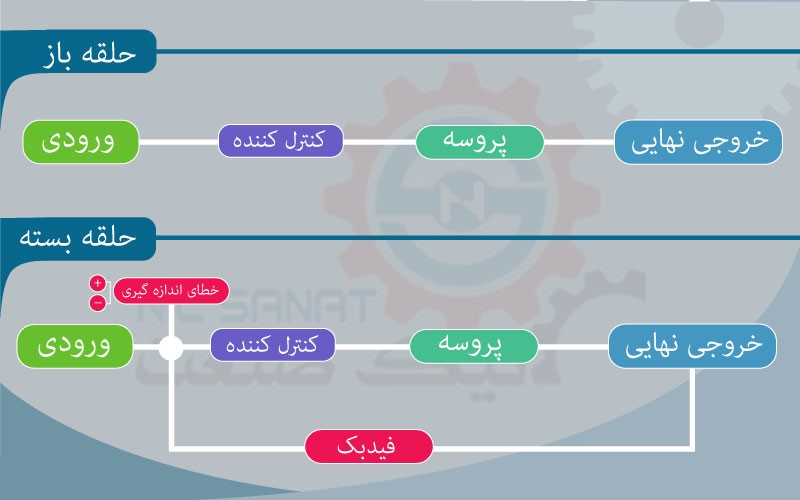
در آموزش PID یادگیری و درک سیستم های کنترلی و ماهیت آنها از اهمیت بسیار بالای برخوردار است، به طور کلی سیستم های کنترلی به دو دسته حلقه باز و حلقه بسته تقسیم میشوند.
- سیستم حلقه باز بدون فیدبک کار میکند به این صورت که دستور روشن و خاموش از طریق کاربر اعمال میشود و یا طبق زمان تنظیم شده ، سیستم روشن و خاموش میشوند. در این حالت فیدبکی از خروجی نداریم تا وضعیت را دقیق تحت کنترل داشته باشیم در نتیجه سیستم متوجه خطا ها نمیشود تا درصدد برطرف کردن آنها باشد.کنترل حلقه باز پیچیدگی خاصی ندارد و درپروسه های حساس جوابگو نیست.
اگر بخواهیم مثالی از این سیستم ها را بیان کنیم فن های خنک کننده میتواند نمونه مناسبی باشند. این فن ها توسط کلید خاموش یا روشن میشوند و اطلاعی از دمای محیط ندارند فقط توسط کاربر روشن یا خاموش میشوند برخی از آنها تایمر دارند و میتوانند در زمان تعیین شده کار کنند و یا خاموش شوند.

مشکل این سیستم این است که فن درکی از شرایطی محیطی ندارد به این صورت که اگر دمای محیط خیلی سرد تر از حد مطلوب شود باز هم فن مشغول به کار است تا زمانی که توسط شخص خاموش شود و یا زمان تنظیم شده آن به اتمام برسد. برعکس اگر دما خیلی گرم تر از حد مطلوب باشد و زمان تنظیم شده فن تمام شود فن بدون توجه به شرایط محیط خاموش میشود.
- اما سیستم حلقه بسته دارای یک یا چندین فیدبک میباشد به این صورت که خروجی از طریق سنسور وضعیت سیستم را به کنترلر گزارش میدهد و کنترلر بر اساس وضعیت لحظه ای فرایند را تحت نظر دارد. کنترل حلقه بسته دقت بالایی دارد و در صنعت استفاده میشود. عملکرد سیستم به این صورت است که کمیت تحت کنترل دائما توسط حسگر ها اندازه گیری شده و با مقدار مطلوب مقایسه میشود.اختلاف بین مقدار مطلوب و مقدار اندازه گیری شده میزان خطا را نمایش میدهد و در نهایت خروجی به گونه ای اعمال میشود تا خطا را حذف کند یا کاهش بدهد.
سیستم کروز کنترل ماشین نمونه مناسبی از کنترل حلقه بسته است. راننده سرعت دلخواه خود را انتخاب کرده و ماشین با دریافت فیدبک سرعت لحظه ای ماشین را دریافت کرده و آن بالا و پایین میبرد تا در نزدیک ترین حالت به مقدار مد نظر راننده باشد. کنترل حلقه بسته یا به صورت گسسته است و یا به صورت پیوسته که در ادامه آموزش PID هر دو نوع را دقیق تر بررسی میکنیم.

کنترل گسسته
کنترل گسسته یا دیجیتال معمولا یه صورت 0 و 1 است به این صورت است که خروجی یا فعال بوده و یا غیر فعال است. کنترل گسسته در دو نوع on/off و یا pwm شناخته میشود.
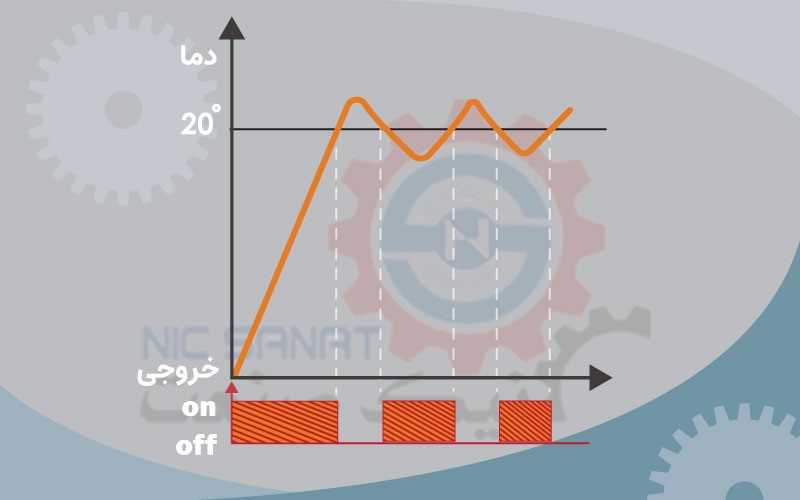
- کنترل on/off معمولا روش ساده تری بوده و در پروژه هایی که دقت خیلی بالایی نیاز نیست استفاده میشود.فرض کنید برای کنترل دمای محیط از یک کنترلر استفاده میکنیم که یک هیتر را روشن و خاموش میکند . در این حالت اگر دما از مقدار مطلوب که برای کنترلر تعیین شده بالاتر برود کنترلر هیتر را خاموش میکند و اگردما پایین تر از حد مطلوب برسد هیتر روشن میشود.معمولا در این نوع کنترل یک حد مجاز اختلاف با ست پوینت را در نظر میگیرند تا خروجی آسیب نبیند و با سرعت روشن خاموش نشود به این مقدار هیسترزیس میگویند.
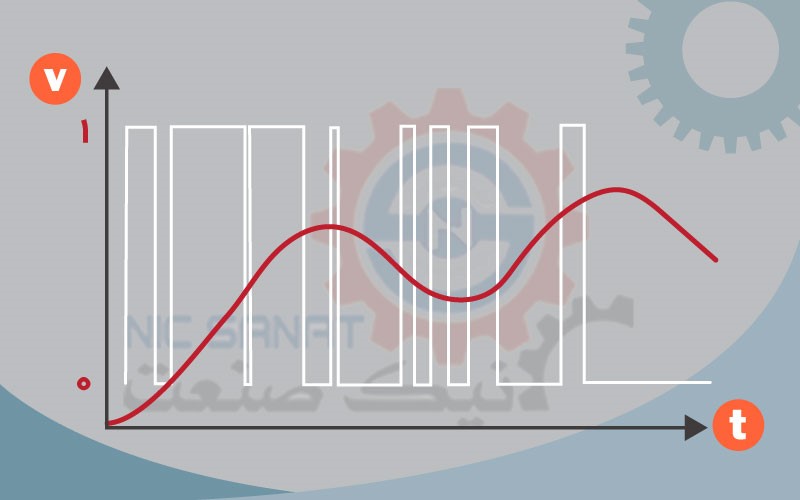
- روش کنترل pwm میتواند رابط بین دیجیتال و آنالوگ باشد به این معنی که با استفاده از پالس 0 و 1 سیگنال آنالوگ ایجاد میشود.یعنی مدت زمان 0 و 1 شدن های خروجی به گونه ای تنظیم میشود که میانگین آنها بتواند خروجی را در نقطه مطلوب نگه دارد.فرض کنید فشار یک پمپ باید روی 5 بار باشد.در ابتدا یک بازه زمانی مشخص تعین میکنیم. مثلا 10 ثانیه .
زمانی که فیدبک خیلی کمتر از این مقدار باشد کل مدت 10 ثانیه، خروجی روشن است تا سریعا اختلاف را جبران کند، زمانی که فشار نزدیک به 5 بار میشود مدت زمان روشن بودن خروجی کمتر میشود فرضا 7 ثانیه خاموش بوده و 3 ثانیه روشن است. به همین صورت اگر فشار از 5 بار عبور کند، مدت زمان خاموش بودن بیشتر شده تا فشار کاهش پیدا کند.
کنترل پیوسته
کنترل پیوسته و یا آنالوگ شکل دیگری از کنترل حلقه بسته است که کمیت های قابل اندازهگیری را مانند دما ، فشار ، وزن و.. را کنترل میکند. PID CONTROLLER معروف ترین نوع کنترل حلقه بسته پیوستهاس که در بسیاری از فرایندها کاربرد دارد.
اصطلاحات کاربردی در PID
یادگیری اصطلاحات رایج این مبحث در حین آموزش PID از اهمیت بالایی برخودار است:
- ابتدا باید مقدار مدنظرمان را برای سیستم مشخص کنیم به این مقدار set point میگویند. برای مثال پمپ باید به گونه ای کار کند که ارتفاع سطح آب درون مخزن دریک نقطه ثابت باشد و یا هیتر باید به نحوی کار کند که دمای محیط در یک مقدار مشخص ثابت باشد. این مقدار sp توسط کاربر تعیین میشود.
- مقداری که توسط سنسور اندازه گیری شده است process value نام دارد که در واقع منظور همان مقدار لحظه ای که در خروجی مشاهده میشوداست که به آن pv میگویند.
- تفاوت ست پوینت (sp) و مقدار لحظه ای (pv) مقدار مشخصی به نام error یا خطا نامیده میشود. این مقدار هر چه قدر کمتر باشد سیستم دقیق است. Pid controller تلاش دارد E را به صفر نزدیک کند.
- ضرایب PID که هر کدام تاثیر خود را بر روی سیگنال خطا دارند که با توجه به نیاز شرایط پروژه آنها تعیین کرده و با مقدار دادن به هر کدام از این ضرایب میتوانیم بهترین نتیجه را از سیستم دریافت کنیم.
فرمول ها و تابع تبدیل PID Controller
جهت درک بهتر در فرآیند آموزش PID، در ادامه میتوانید فرمول استاندارد و تابع تبدیل آن را مشاهده کنید.
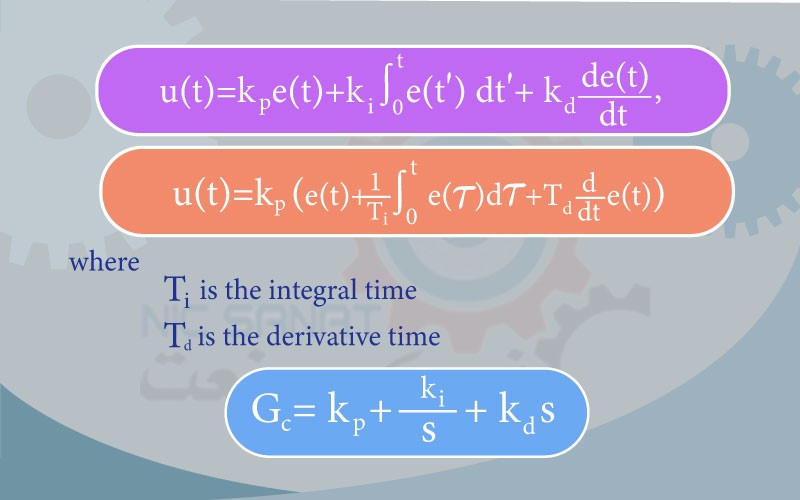
در این جدول هر یک از پارامترها معرفی شدهاند.
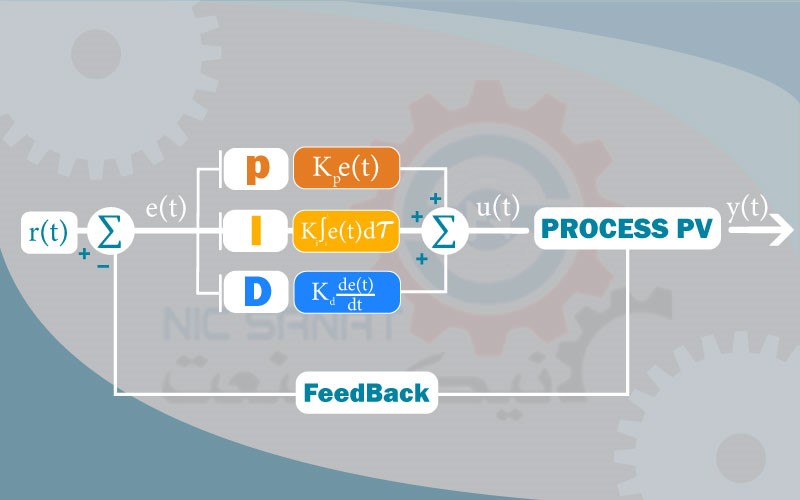
در نهایت فرایند کلی کنترل کننده pid در شکل زیر مشخص شده است. مقدار PV که توسط فیدبک نشان داده مشود از مقدار SP کم شده و تفاضل آنها مقدار خطا را نشان میدهد. ضرایب P وI و D بر روی سیگنال خطا تاثیر میگذارد و بهترین خروجی را ارائه میکند.
در این نمودار از آموزش PID، میتوانید فرآیند کلی pid را مشاهده میکنید. خط آبی رنگ مقدار sp است که باید سیستم در این مقدار ثابت شود و خط قرمز رنگ مقدار pv یا همان مقدار لحظه ای خروجی است. لازم است با مفاهیم مهمی که درنمودار pid نمایش داده شده است آشنا شوید تا این فرایند را بهتر درک کنید.
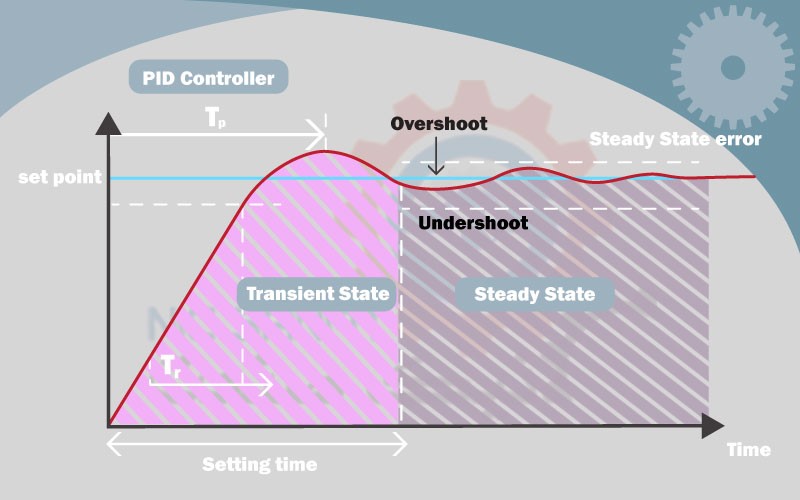
Transient state: محدوده گذرا است در این محدوده سیستم overshoot و undershoot بیشتری دارد و خطای سیستم زیاد است.
tr: مدت زمانی است که پاسخ سیستم از 10 درصد به 90 درصد نهایی خود برسد.درواقع این زمان، سرعت پاسخ سیستم را مشخص میکند.
Tp: مدت زمان رسیدن به مقدار ماکسیمم، اولین overshoot یا فراجش در سیستم است.
Setteling time: مدت زمانی است که طول میکشد تا منحنی پاسخ یا همان pv به محدوده معینی حول مقدار نهایی یا همان sp برسد و در آن محدوده باقی بماند.
Steady state error: این محدوده ماندگار است. در این محدوده سیستم بالا و پایین های شدید ندارد خطای سیستم به مرور کمتر شده و نزیدک به محدوده معین قرار میگیرد.
ویژگی های یک سیستم کنترلی مطلوب
یک سیستم کنترلی مطلوب باید ویژگی های داشته باشد تا PID کنترلر بتواند بهترین نتیجه را داشته باشد
1 اختلاف بین SP و PV خیلی زیاد نباشد و سیستم پایدار باشد
2 سیستم نوسانی و یا خیلی کند نباشد
3 ضربه های ناگهانی در خروجی نداشته باشیم
4 overshoot و undershoot قابل قبولی داشته باشد.
در این بخش از آموزش PID، به سراغ یادگیری و آشنایی با ضرایب میرویم و ضرایب I، P، و D را مورد بررسی قرار میدهیم.
ضریب p
این ضریب متناسب با سیگنال ارور است. در واقع مقدار خطا در ضریب kp یا همان gain ضرب میشود و هرچه خطا بیشتر باشد خروجی بزرگ تر میشود. افزایش ضریب p پاسخ سیستم را سریع تر میکند.این ضریب تلاش دارد هرچه سریع تر خروجی را به مقدار sp برساند. بزرگ بودن ضریب p همچنین خطای حالت ماندگار را کاهش میدهد اما ممکن است سیستم را نوسانی کند. اگر ضریب p را خیلی بزرگ انتخاب کنیم کنترلر به صوت on/off میشود و اگر هم خیلی کوچک انتخاب شود ، تاثیر ضریب خیلی ناچیز است و کارساز نخواهد بود.
ضریب i
این ضریب از سیگنال ارور انتگرال گرفته و به سیستم فرمان میدهد.در واقع در هر cycle time مقدار ارور قبلی با ارور فعلی جمع میشود و این عمل تا زمانی ادامه پیدا میکند که میزان ارور صفر شود. اگرخطا بزرگ باشد ، ضریب I خروجی را به سرعت بالا و پایین میکند ولی اگر خطا کوچک باشد تغییرات به آرامی اعمال میشوند.
انتگرال به معنی سطح زیر منحنی اروراست. یعنی هرچه قدر خطا داشته باشیم به مرور افزایش پیدا کرده و خروجی کنترلر بزرگ و بزرگ تر شده و به این ترتیب سیستم تا جایی ادامه میدهد که خطا را صفر کند. اگر چه در ضریب تناسبی، نمودار خطا انحراف دارد، ولی ضریب I به مرور سطح زیر منحنی خطا زیاد میشود (حتی اگر میزان خطا کم باشد) و باعث افزایش سیگنال خروجی از کنترلکننده و کاهش مقدار خطا میشود. این ضریب خطای حالت ماندگار را حذف میکند. نکته قابل توجه این است که ضریب I برای سیستم هایی که تغییرات سریع دارند مناسب نیست.
ضریب d
این ضریب از سیگنال ارور مشتق میگیرد یعنی شیب خط منحنی خطا را بدست میآورد. ضریب d وضعیت فعلی سیگنال ارور با وضعیت قبلی آن مقایسه کرده و اگر تغییری وجود داشت به خروجی فرمان میدهد.یعنی اگر ارور یک مقدار ثابتی باشد ضریب d تاثیر خاصی نمیگذارد.پس این ضریب هرگز به تنهایی استفاده نمیشود. ضریب d با تغییر ناگهانی ارور از خودش واکنش نشان میدهد.اگر این ضریب را زیاد انتخاب کنیم نوسان شدیدی در سیستم ایجاد میکند.
تنظیم ضرایب
مقدار دهی به ضرایب pid به دو صورت انجام میشود. یا به صورت دستی به این ضرایب مقدار میدهیم که این فرایند ممکن است دشوار بوده و بسیار زمان بر باشد زیرا مقدار دهی بر اساس سعی و خطا است. استفاد از فرمول و محاسبات ریاضی برای پیدا کردن ضرایب نیز در فرایند های صنعتی بسیار دشوار و زمان بر است به همین دلیل معمولا از فرمول ها استفاده نمیشود . ضرایب در هر پروژه با توجه به کاربری آن ، شرایط محیطی و تجهیزات به کار رفته تنظیم میشود و در هر پروژه متفاوت است.
نحوه انتخاب ضرایب I ،P و D
برای بخش تنظیم ضرایب در آموزش PID، ابتدا ضریب p را مقدار دهی میکنیم و ضرایب مشتق گیر و انتگرال گیر یعنی I و d را صفر قرار میدهیم. ضریب p را چند مقدار مختلف 10 20 40 تنظیم میکنیم. (توجه کنید این اعداد برای نمونه ذکر شده اند و ممکن است در پروژه های مختلف این نتیجه با مقادیر دیگر حاصل شود.
ضریب p را باید به گونه ای انتخاب کنید که یک فراجهش یا overshoot را در سیستم ببینید. اگر ضریب p را 10 قرار دهیم پاسخ سیستم بسیار کند است و سیستم به sp نمیرسد.
اگر آن را 20 گذاشته سیستم به مقدار مطلوب نزدیک خواهد شد ولی فراجهش نداریم و این مناسب نیست.
اما ضریب 40 میتواند اولین overshoot سیستم را به ما بدهد دقت کنید overshoot باید مقدار قابل قبولی باشد اگر مقدار آن زیاد باشد سیستم نوسانی شده و از کنترل خارج میشود همچنین ممکن است فراجهش سیستم به تجهیزات ما آسیب بزند.
با تنظیم ضریب p سیستم باید به مقداری نزدیک به مقدار مطلوب قرار بگیرد همراه با خطا که به آن خطای حالت ماندگار میگوند. در این مرحله ضریب I برای از بین بردن خطای حالت ماندگار وارد عمل میشود.
به ضریب I مقادیر 1، 2 ، 4 ، را اختصاص میدهیم. عددی که نزدیک ترین حال را ایجاد میکند مناسب ترین است. ضریب I به طور کلی نباید از ضریب p بزرگتر باشد. در انتها برای از بین بردن تغییرات سریع و بزرگ ضریب d را مقدار دهی میکنیم. این ضریب با احتیاط باید انتخاب شود و معمولا کمتر از 10 درصد ضریب p میباشد.
همان طور که دیدید با تنظیم ضرایب p و i سرعت پاسخ سیستم افزایش پیدا کرده و خطای حالت ماندگار نیز کاهش میابد.
به طور کلی تنظیمات و کنترل سیستم نیاز به تجربه و تمرین و تکرار دارد. چنانچه درپروژه pid control به مشکل بر خوردید میتوانید با تیم فنی مجموعه نیک صنعت در ارتباط باشید.
اما روش بعدی تنظیم خودکار ضرایب یا اتوتیون است.
در این حالت سیستم وضعیت لحظه ای و هدف را تخمین زده و ضرایب را به بهترین حالت تنظیم میکند.سیستم برای تیون کردن این روش برای تنظیم ضرایب نیاز به زمان دارد تا تمامی جوانب را بررسی کرده و بهترین نتیجه را اعمال کند.
کاربردهای pid controller
کنترل کننده pid به عنوان یکی از کاربردی ترین کنترلر های صنعتی می باشد و در بحث آموزش PID نیز از اهمیت بالایی برخوردار است.
از جمله کاربرد های سیستم های کنترلی pid میتوانیم به سیستم کنترل بوستر پمپ آب رسانی اشاره داشته باشینم

کنترلر های بوستر پمپ توسط ترنسمیتر های فشار ، فشار آنلاین را به سیستم ارسال می کند که به عنوان فیدبک به سمت درایو یا کنترلر بوستر پمپ ارسال می کند و سیستم کنترلر درایو از با توجه به فشار آنلاین سیستم دور موتور به صورت متغیر از صفر تا صد درصد کنترل می شود .
از جمله کاربردهای دیگر سیستم PID کنترل سطح مخازن و کنترل هوشمند سطح مخازن آب رسانی است.
سیستمpid کنترل علاوه بر کاربردهایی که در هوشمندسازی سیستم تاسیسات ساختمان دارد، در کنترلرهای دما و کورههای رنگ و کورههای دندان پزشکی و صنایع مربوط هم مرتبط میشود.

دوره های حضوری پیشنهادی برای آموزش PID
لازم به ذکر است که مبحث آموزش PID همانند دیگر مباحث دیگر در حوزه اتوماسیون صنعتی و برق، نیازمند مطالعه مدوام و همینطور تمرین و تست گیری به صورت عملی است ، راهاندازی سیستمهای کنترل PID نیز نیازمند تجربه راهاندازی است و راهاندازی آن به صورت عملی و تجربی است.، پیشنهاد میشود حتما پس از فراگیری مطالب به صورت تئوری، اقدام به شرکت در دوره آموزش PID به صورت حضوری در نیک صنعت کنید. در کلاس های آموزشی که در ادامه به آنها اشاره میکنیم، مباحثی از قبیل آموزش PID سطح، دما و کنترلر PID مورد بررسی قرار میگیرند.
آموزش PID در دلتا به کمک دوره آموزشی پیشرفته PLC و HMI برند Delta در نیک صنعت
در این دوره علاوه بر یادگیری کار با پی ال سی و اچ ام آی به صورت حرفه ای و کاربردی، میتوانید به صورت کاملا عملی و به کمک پک خلاقانه ساخته شده توسط مجموعه نیک صنعت نحوه عمل کرد، کنترل و برنامه نویسی PID را با PLC دلتا آموزش ببینید، این دوره فرصت بسیار عالی برای آموزش PID در دلتا میباشد و به همه کسانی که در حوزه اتوماسیون صنعتی و همچنین PID علاقه مند هستند پیشنهاد میشود در آموزش PLC دلتا شرکت کند.

آموزش PID در زیمنس به کمک دوره آموزشی پیشرفته PLC 1200&1500 برند Siemens در نیک صنعت
در این دوره به یادگیری کار با پی ال سی های S7-1200 و S7-1500 زیمنس در سطح حرفه و تخصصی میپردازید، در این دوره نیز از پک PID مجموعه نیک صنعت استفاده میشود و دانش پذیران میتوانند به آموزش PID در زیمنس به صورت کاملا عملی و پروژه محور بپردازید، پیشنهاد میشود حتما در آموزش PLC زیمنس شرکت نمایید.

راههای ارتباطی نیک صنعت:
- تماس با نیک صنعت: 87700210
- واحد فروش نیک صنعت: 09197872783
- واحد تعمیرات نیک صنعت: 09197872789
- ایمیل نیک صنعت: info@nicsanat.com
- آدرس شرکت: تهران، خیابان بهشتی، خیابان میرعماد، کوچه پیمانی (یازدهم)، پلاک 17













































































سلام عزيزم از ديدن أموزش pid controller در صفحه شما خوشحال شدم , نمى دانم أيا مى توانيد يك دوره أموزشى براى من انجام دهيد يا جه توصيه اى براى من داريد
ممنون ازباسخ شما
با سلام و عرض خسته نباشید خدمت شما
بله در داخل دوره های سطح پیشرفته PLC های دلتا، زیمنس و فتک شما میتوانید با پک آموزشی PID تمرین کنید و به صورت عملی با این پک آموزشی کار کنید.
در صورتی که تمایل به ثبت نام در داخل دورههای آموزشی نیک صنعت را دارید، با شماره تلفن 87700210-021 تماس حاصل فرمایید.