نحوه انتخاب سروو همراه با محاسبه توان سروو موتور
در دنیای مدرن مهندسی، کنترل دقیق حرکت مکانیکی یکی از نیازهای اساسی صنایع میباشد. انتخاب سرووموتورها به عنوان موتورهای کنترل […]

در دنیای مدرن مهندسی، کنترل دقیق حرکت مکانیکی یکی از نیازهای اساسی صنایع میباشد. انتخاب سرووموتورها به عنوان موتورهای کنترل شده با فیدبک، این امکان را فراهم میکنند تا سرعت، موقعیت و شتاب محورهای مکانیکی با دقت بالا تنظیم شود. این موتورها در کاربردهای متنوعی مانند رباتیک، ماشینهای CNC، خطوط تولید خودکار و تجهیزات پزشکی به کار میروند. در این مقاله به بررسی پارامترهای کلیدی در انتخاب سروو و نحوه محاسبه توان سروو موتور میپردازیم.
پارامترهای مهم در انتخاب سروو موتور
انتخاب صحیح سروو موتور برای هر سیستم،تاثیر مستقیمی بر بازدهی ،دقت و طول عمر تجهیزات دارد. یک انتخاب نادرست میتواند باعث افزایش مصرف انرژی، کاهش دقت حرکت، استهلاک سریع موتور و حتی خرابی سیستم شود. خرید سروو موتور مناسب نیازمند بررسی دقیق پارامترهای مکانیکی و الکتریکی است. در ادامه به معرفی و تاثیر مهمترین پارامترهای سروو موتور میپردازیم.
گشتاور موتور
گشتاور در سروو، به نیرو چرخشی تولید شده توسط موتور که میتواند یک بار مکانیکی را به حرکت درآورد، میگویند. در هنگام انتخاب موتور، دو نوع گشتاور اصلی باید در نظر گرفته شود.
- گشتاور اصطکاک: این نوع گشتاور، به صورت ثابت درنظر گرفته میشود که همیشه وجود دارد.
- گشتاور شتابدهنده: گشتاور شتابدهی و گشتاور کاهش سرعت نیز مقادیر ثابتی هستند که فقط در زمان شتابگیری و کاهش سرعت اعمال میشوند.
در زمان راهاندازی، گشتاور شتابدهنده با گشتاور اصطکاک جمع میشود. هنگام کاهش سرعت، گشتاور کاهش سرعت از گشتاور اصطکاک کم میشود. زیرا گشتاور اصطکاکی به کاهش سرعت موتور کمک میکند.
پروفایل حرکت
پروفایل حرکت، رابطه بین زمان و سرعت در هر بخشی که باید کنترل شود، را نشان میدهد. بسیار مهم است در زمان انتخاب سروو، بیشترین مقدار پروفایل حرکت (سریعترین شتابگیری و بالاترین سرعت) در نظر گرفته شود. در کنار توجه به پروفایل حرکت، درنظر گرفتن زمان استراحت موتور نیز بسیار مهم است. چراکه زمان استراحت بیشتر، گشتاور موثر (RMS) مورد نیاز را کاهش میدهد و بر انتخاب موتور تاثیر قابل توجهی دارد.
اینرسی بار
مقاومت بار در برابر تغییر سرعت چرخش، که ناشی از جرم و توزیع آن نسبت به محور دروان است. هر جسمی که توسط موتور به حرکت در میآید، نقش اینرسی بار را برعهده دارد. کاهش اینرسی بار منجر به کاهش گشتاور و کاهش نسبت اینرسی میشود. اگر نسبت اینرسی بار به اینرسی موتور زیاد باشد، موتور نمیتواند شتاب مناسب ایجاد کند و خطای موقعیت افزایش مییابد.
ضریب ایمنی
معمولا گشتاور موتور کمی بیشتر از گشتاور کل مورد نیاز، انتخاب میشود. این ضریب ایمنی کمک میکند تا موتور در شرایط بار اضافی یا شتاب بالا آسیب نبیند.
توان موتور
میزان توان مکانیکی تولید شده توسط موتور که به کار مفید تبدیل میشود. توان موتور باید با توجه به گشتاور بار و شتاب مورد نیاز تعیین شود. فرمول محاسبه توان مکانیکی موتور را در ادامه مشاهده میکنید.
= PT×ω9550⁄
P= توان با واحد کیلووات
T= گشتاور با واحد نیوتنمتر
ω= سرعت زاویهای موتور با واحد RPM (دور بر دقیقه)
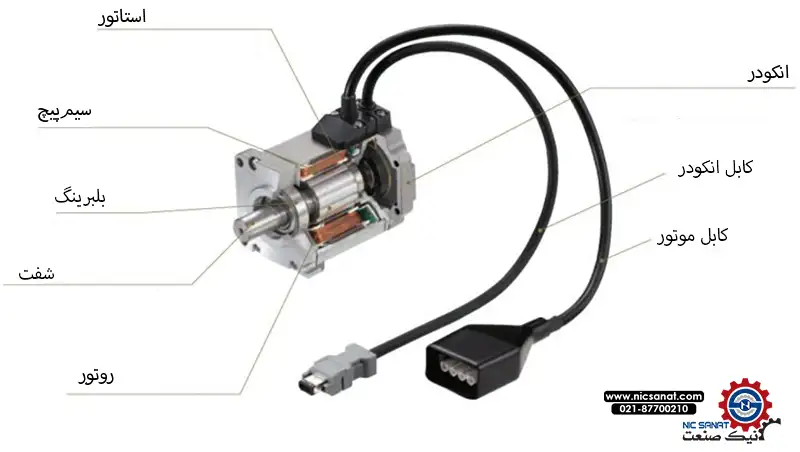
دقت موقعیتیابی
در انتخاب سرووموتورها، دقت موقعیتدهی یکی از معیارهای اصلی به حساب میآید. این پارامتر معمولا برحسب درجه و یا میلیمتر در خط، در زمان حرکت خطی بیان میشود. انکودر متصل بر روی موتور نقش کلیدی روی دقت کنترل موقعیت در سرووموتورها دارد.
نوع درایو وکنترلر
سروو موتور بدون درایو کاری انجام نمیدهد. نوع درایو باید با موتور و کاربرد آن هماهنگ باشد. به این منظور که نوع جریان کارکرد موتور اگر براساس AC و یا DC باشد، درایو نیز باید متناسب با آن باشد. درایو کنترل دقیق جریان و ولتاژ و همچنین فیدبک از انکودر موتور را فراهم میکند.
منبع تغذیه
سروو موتورها براساس نوع طراحی خود، با ولتاژ AC و یا DC کار میکنند. در انتخاب سروو موتور، توجه به نوع منبع تغذیه و متناسب با موتور، از اهمیت بالایی برخوردار است تا موتور دچار افت ولتاژ یا اضافهجریان نشود.
محاسبه توان سروو موتور
یکی از مهمترین معیارها در انتخاب سرووموتور، توان مورد نیاز موتور است. توان موتور باید با توجه به گشتاور بار، شتاب مورد نیاز، اصطحکاک مکانیکی و سیکل کاری سیستم محاسبه شود. در دوره آموزشی سروو به طور تخصصی نحوه اندازهگیری و محاسبه توان سروو موتور آموزش داده میشود. افزایش زمان شتابگیری تا سرعت نهایی میتواند نرخ گشتاور شتابدهنده را کاهش دهد. درواقع توان موتور مشخص میکند چقدر انرژی، موتور برتی چرخاندن بار مصرف میکند. محاسبه درست توان، به انتخاب موتور مناسب، افزایش عمر آن و جلوگیری از آسیب دیدن سیستم کمک میکند.
گام اول: تعیین گشتاور بار
گشتاور بار به معنی نیروی چرخشی که موتور جهت حرکت دادن بار نیاز دارد، میباشد. از جمله عواملی که بر گشتاور بار تاثیر میگذارند، شامل موارد زیر میشوند.
- جرم بار یا قطعهای که موتور حرکت میدهد.
- شعاع چرخش یا فاصله مرکز جرم تا محور
- اصطکاک در یاتاقانها و تجهیزات مکانیکی
- نیرویی که برای شتابدهی به بار لازم است.
فرمول گشتاور بار ساده برای یک شفت میتواند باشد:
T(friction)+ α ×J=T(load)
α= شتاب زاویهای rad/s²
J= اینرسی بار ²kg.m
Tfriction= گشتاور ناشی از اصطکاک
گام دوم: محاسبه توان مکانیکی
توان یک مفهوم برای سنجش مقدار انرژی ورودی و خروجی است که واحد آن وات و یا ژول بر ثانیه میباشد. در الکتروموتورها ،انرژی الکتریکی به انرژی مکانیکی تبدیل میشود. برای محاسبه توان سروو موتور، توان خروجی مکانیکی مدنظر است.
زمانیکه گشتاور بار را بدانیم ،توان مکانیکی موتور را از طریق فرمول زیر میتوانیم محاسبه کنیم. این فرمول مشخص میکند برای گشتاور و سرعت مشخص ،موتور چه مقدار توان نیاز دارد.
T × ω/ 9550 = P
P: توان مکانیکی (کیلووات)
T= گشتاور کل موتور (نیوتونمتر)
ω= سرعت زاویهای موتور (RPM)
در این فرمول، 9550 یک عدد ثابت است که واحدها را هماهنگ میکند.
گام سوم: گشتاور شتابدهی و پیک
در زمان شتابدهی موتور، نیاز به گشتاور بیشتری داریم که گشتاور کل موتور از فرمول زیر بدست میآید. پس محاسبه گشتاور، میتوان توان کل موتور را محاسبه نمود.
T(friction)+T(acceleratian)+Tload=T(total)
گام چهارم: انتخاب ضریب ایمنی
معمولا توان موتور کمی بالاتر از توان محاسبه شده، انتخاب میشود تا موتور تحت شرایط واقعی و نوسانهای بار ،آسیب نبیند. همچنین باید توجه داشت که ضریب ایمنی معمولا بین 1.2 تا 1.5 بدست میآید.
SF ×P(calculated)=P(motor)
نکات مهم جهت محاسبه دقیق
- همیشه شتاب بار و اینرسی آن را در محاسبه توان در نظر بگیرید.
- گشتاور اصطکاک و مقاومت مکانیکی تجهیزات را فراموش نکنید.
- اگر موتور سروو با درایو دیجیتال استفاده میکنید، توان لحظهای یا پیک هم مهم است.
- ضریب ایمنی را همیشه برای جلوگیری از آسیب موتور اعمال کنید.
مثال ساده
فرض کنید بار روی محور یک موتور، به 10 نیوتونمتر گشتاور نیاز داشته باشد. پس موتور باید با سرعت 1500 دور در دقیقه بچرخد. اگر ضریب ایمنی را 1.3 نظر بگیریم، موتور به چه مقدار توان نیاز دارد؟
· محاسبه توان اولیه بدون ضریب ایمنی:
P = T × ω / 9550 = 1500 × 10 / 9550 ≈ 1.57 kW
· اعمال ضریب ایمنی:
P(motor)=1.3 ×1.57 ≈2.04 kW
درنتیجه موتور حداقل به 2 کیلووات توان نیاز دارد.
نگهداری سروو موتور
سروو موتورها به دلیل برخورداری از انکودر دقیق و سیستم فیدبک، بسیار حساس هستند. گرد و غبار، روغن و یا رطوبت میتواند باعث خطا یا خرابی انکودر بشود. از طرفی یاتاقانها قطعههای مکانیکی هستند که بیشترین استهلاک را دارند. در موتورهای صنعتی بررگ، باید طبق دستور سازنده، روعنکاری و یا گریسکاری دورهای توسط متخصصان این حوزه انجام شود. درنتیجه نگهداری دورهای و صحیح از سرووها بسیار مهم میباشد. همچنین در صورت مشاهده لرزش زیاد و کاهش دقت در موقعیتیابی دستگاه، سریعا جهت تعمیر سروو اقدام فرمایید.


































































































نظرات کاربران