اتصال انکودر به PLC Delta
اتصال انکودر به PLC DELTA در plcهای دلتا دو نوع کانتر برای کانترهای High speed وجود دارد. اولین نوع software […]

- اتصال انکودر به PLC DELTA
- کاربرد پایههای RESET و START سخت افزاری
- توضیح نرم افزار WPLSOFT پی ال سی دلتا
- مثال 1) محاسبه سرعت خطی با اتصال انکودر به پی ال سی دلتا
- مثال 2) نحوه اتصال انکودر به پی ال سی دلتا
- مثال 3) محاسبه حرکت نوار نقاله با اتصال انکودر به PLC دلتا
- مثال 4) محاسبه پوزیشن محور با اتصال انکودر به پی ال سی دلتا
اتصال انکودر به PLC DELTA
در plcهای دلتا دو نوع کانتر برای کانترهای High speed وجود دارد. اولین نوع software high speed counter (نرم افزاری) و دیگری hardware high speed counter (سخت افزاری) است.
در نرم افزاری، میکروکنترلر plc وظیفه شمارش پالسها را بر عهده دارد اما سخت افزاری یک کانتر مجزا و مختص برای شمارش پالسها دارد. تفاوت این دو نوع کانتر در شمارش پالسها است. کانتر نرم افزاری فرکانس کمتری از پالسها را میتواند شمارش کند اما کانتر سخت افزاری فرکانس بالاتری از پالسها را میتواند شمارش کند. معمولا انکودرها تعداد پالس و فرکانس بیشتری دارند و به کانترهای سخت افزاری باید متصل شوند. اگر سرعت حرکت و رزولوشن انکودر از حد مجاز کانترهای نرم افزاری بیشتر نشود، میتوان آنها را برای شمارش پالسها از کانترهای نرم افزاری استفاده کرد. برای بهرهمندی از مشاوره رایگان جهت خرید پی ال سی دلتا با کارشناسان فروش شرکت فنی مهندسی نیک صنعت تماس حاصل فرمایید.
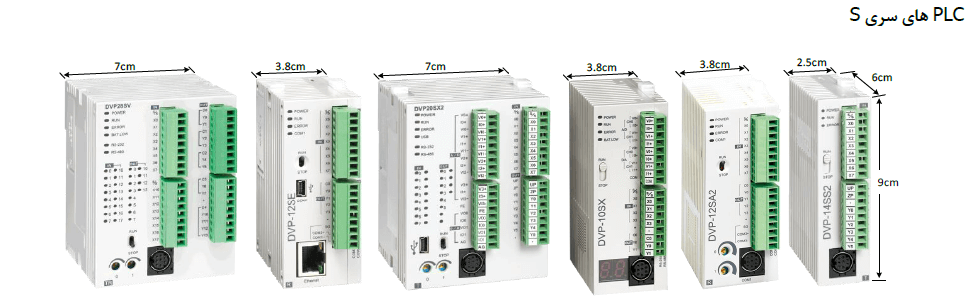
کانتر Hgh Speed در پی ال سی دلتا
در جدول پایین، شماره، تعداد و ماکزیمم فرکانس هر کانتر High speed، برای انواع مدلهای سری S در plc دلتا مشخص است.
| ردیف | مدل PLC دلتا | شماره Software High speed counter |
ماکزیمم فرکانس کانتر نرم افزاری |
شماره Hardware High speed counter |
ماکزیمم فرکانس کانتر سخت افزاری |
| 1 | 14SS2 | ورودی تک فاز: C235~ C242 ورودی دو فاز: C233 ~ C234 |
5khz | ورودی تک فاز: C243~ C250 ورودی دو فاز: C251 ~ C254 |
10khz دو انکودر و 5khz برای 2 انکودر |
| 2 | 12SA2 | ورودی تک فاز: C235~ C242 ورودی دو فاز: C233 ~ C234 |
5khz | ورودی تک فاز: C243~ C250 ورودی دو فاز: C251 ~ C254 |
50khz یک انکودر و 5khz برای 3 انکودر |
| 3 | 10SX | ورودی تک فاز: C235~ C244 |
5khz | ورودی تک فاز: C246~ C250 ورودی دو فاز: C251 ~ C254 |
10khz یک انکودر |
| 4 | 20SX2 | ورودی تک فاز: C235~ C242 ورودی دو فاز : C233 ~ C234 |
5khz | ورودی تک فاز : C243~ C250 ورودی دوفاز: C251 ~ C254 |
50khz یک انکودر و 5khz برای 3 انکودر |
| 5 | 12SE | ورودی تک فاز: C235~ C242 ورودی دو فاز: C233 ~ C234 |
5khz | ورودی تک فاز: C243~ C250 ورودی دو فاز: C251 ~ C254 |
50khz یک انکودر و 5khz برای 3 انکودر |
| 6 | 28SV/SV2 | ورودی تک فاز: C235~ C240 |
5khz | ورودی تک فاز: C241~ C249 ورودی دو فاز: C251 ~ C254 |
100khz 2 انکودر و 10khz 2 انکودر |
برای اتصال انکودر باید از کانترهای high speed سخت افزاری استفاده کرد. از کانترهای شماره C251 تا C254 به دلیل دو فاز بودن A و B استفاده میشود که در همه مدلهای سری S دلتا مشترک هستند.
بررسی کانترهای C251 تا C254
در جدول زیر، کانترهای C251 تا C254 بررسی میکنیم. آدرس ورودیهای PLC مشخص شود تا بتوان پالس A و B انکودر و ورودیهای سخت افزاری RESET و START را متصل کرد.
| ردیف | شماره کانتر | مدل PLC | پالس A | پالس B | RESET | START |
| 1 | C251 | 14SS2 | X0 | X1 | – | – |
| 12SA2 | X0 | X1 | – | – | ||
| 10SX | X0 | X1 | – | – | ||
| 20SX2 | X0 | X1 | – | – | ||
| 12SE | X0 | X1 | – | – | ||
| 28SV/SV2 | X0 | X1 | X2 | X2 | ||
| 2 | C252 | 14SS2 | X0 | X1 | X4 | – |
| 12SA2 | X0 | X1 | X4 | – | ||
| 10SX | X0 | X1 | X2 | – | ||
| 20SX2 | X0 | X1 | X4 | – | ||
| 12SE | X0 | X1 | X4 | – | ||
| 28SV/SV2 | X4 | X5 | X6 | X7 | ||
| 3 | C253 | 14SS2 | X2 | X3 | – | – |
| 12SA2 | X2 | X3 | – | – | ||
| 10SX | – | – | – | – | ||
| 20SX2 | X2 | X3 | – | – | ||
| 12SE | X2 | X3 | – | – | ||
| 28SV/SV2 | X10 | X11 | X12 | X13 | ||
| 4 | C254 | 14SS2 | X2 | X3 | X5 | – |
| 12SA2 | X2 | X3 | X5 | – | ||
| 10SX | X0 | X1 | X2 | X3 | ||
| 20SX2 | X2 | X3 | X5 | – | ||
| 12SE | X2 | X3 | X5 | – | ||
| 28SV/SV2 | X14 | X15 | X16 | X17 |
در جدول بالا به جز مدل 28SV/SV2 پایههای RESET و START سخت افزاری اجباری است. اگر تمایلی به استفاده از این پایهها را ندارید، باید کانتر دیگری که این پایهها را ندارد را استفاده کنید. به عنوان مثال در مدل 14SS2، کانتر C251 برای اتصال انکودر با پالس A و B با ورودی X0 و X1 است. اگر ورودی ریست سخت افزاری بخواهد، از کانتر C252 استفاده شود که دقیقا ورودی X0 و X1 دارد. ورودی X4 ورودی RESET است. برای کسب اطلاعات بیشتر با نمایندگی دلتا تماس بگیرید. در مدل 28SV/SV2 میتوان ورودیهای RESET و START سخت افزاری را غیر فعال کرد که در ادامه توضیح میدهیم.
کاربرد پایههای RESET و START سخت افزاری
پایه RESET سخت افزاری برای ریست کردن کانتر استفاده میشود. علت استفاده از پایه سخت افزاری برای ریست کانتر، جهت دقت بیشتر و سرعت ریست کردن کانتر است. کانتر HIGH SPEED سخت افزاری جدا از سیکل اجرا برنامه PLC، عمل شمارش را انجام میدهد. نتیجه شمارش را در برنامه نمایش میدهد و اگر نیاز به ریست با دقت و سرعت بیشتر است؛ از پایه ریست سخت افزاری استفاده شود. از سیکل اجرا PLC عمل ریست کانتر را انجام میدهد.
پایه START همانند پایه GATE در کانترهای PLC DELTA عمل میکند و به عنوان پایه فعال یا اجازه شمارش پالسهای انکودر در کانتر است. چنانچه این پایه فعال شود، عمل شمارش انجام میشود و هنگامی که غیر فعال شود، کانتر عمل شمارش را متوقف عمل میکند. زمانی به شمارش ادامه میدهد که مجددا پایه فعال شود و اگر کانتری این پایه را نداشته باشد، نیازی به تعریف پایه استارت یا ورودی سخت افزاری برای آن کانتر نیست.
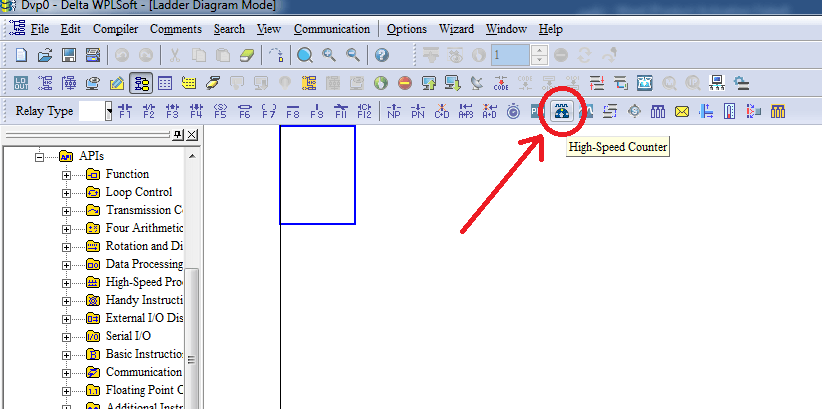
برای استفاده از کانترهای HIGH SPEED و اتصال انکودر، پس از انتخاب نوع PLC و شماره کانتر مربوط و اتصال ورودیهای پالس A و B طبق جدول صفحه قبل به نرم افزار WPLSOSFT مراجعه کنید و کانتر مورد نظر را در برنامه فراخوانی کنید. از سربرگ ابزار گزینه HIGH SPEED COUNTER را کلیک کنید.
به جز مدل SV/SV2، پنجره زیر برای موارد دیگر باز میشود.
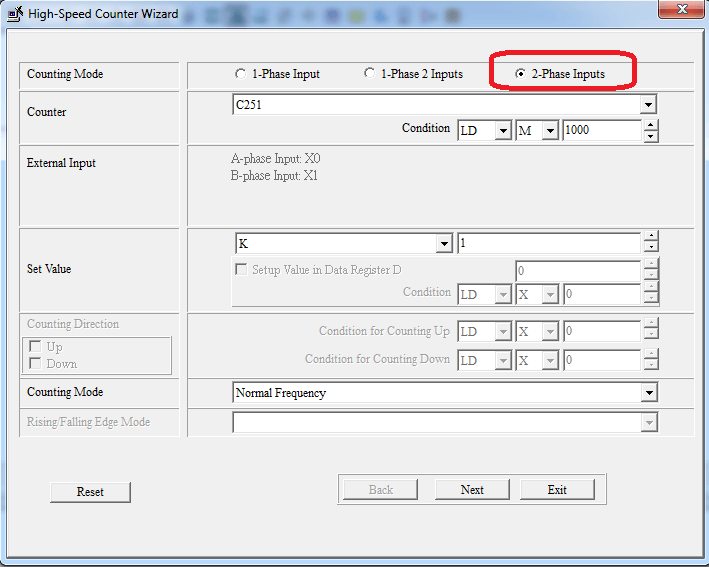
توضیح نرم افزار WPLSOFT پی ال سی دلتا
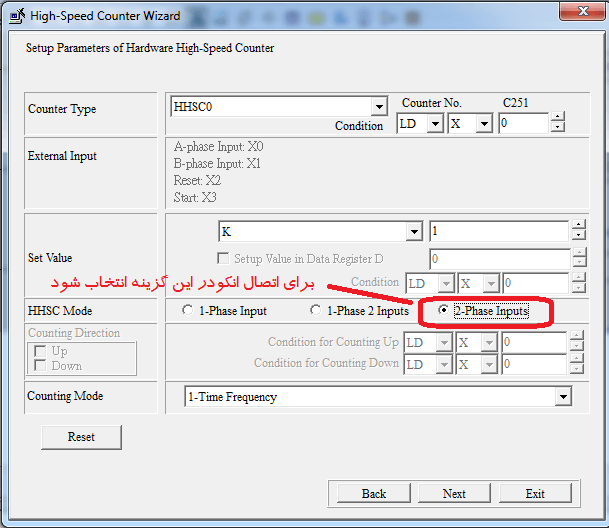
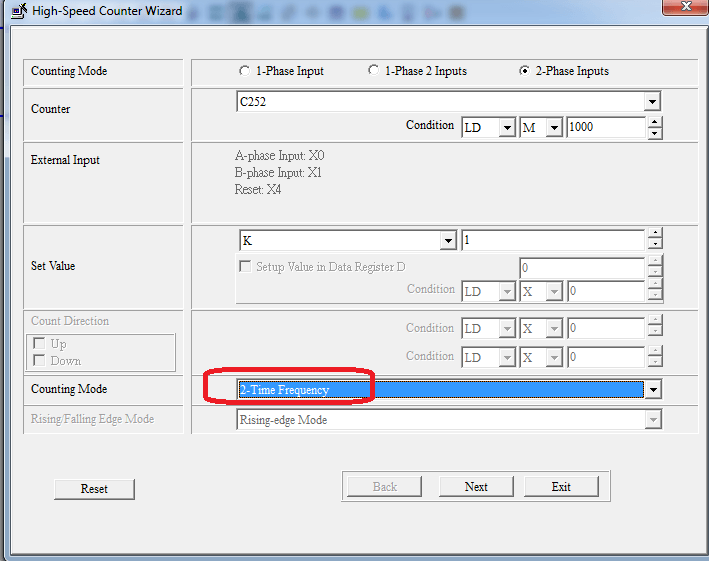
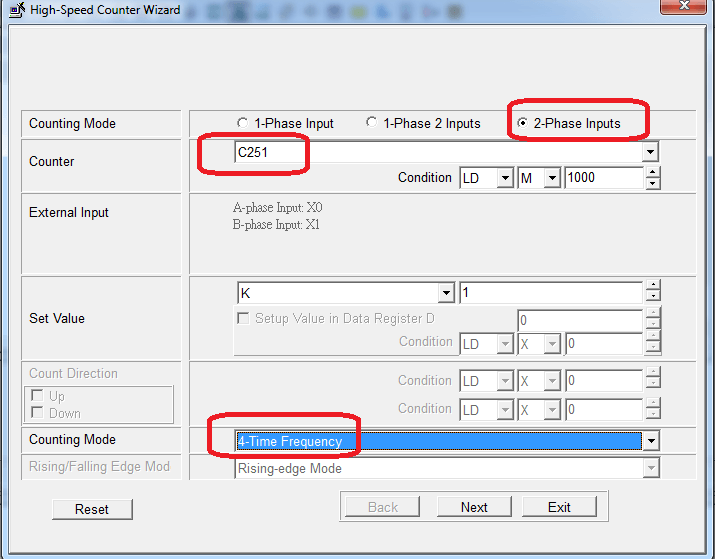
- Counting Mode: انکودر دارای دو پالس A و B است که گزینه 2 phase inputs را انتخاب کنید.
- Counter: شماره کانتر مورد نظر را (c251 تا c254) با توجه به موارد استفاده طبق جدول انتخاب کنید. اگر کانتر با یک بیت خاصی فعال یا غیر فعال شود، میتوان در قسمت condition این بیت یا ورودی سخت افزاری مورد نظر را انتخاب کرد. اگر همواره این کانتر فعال باشد و پالسهای انکودر، شمارش شود؛ بیت همواره فعال در plc دلتا یعنی بیت M1000 انتخاب شود.
- External input: این بخش نیازی به تنظیم ندارد و فقط آدرس ورودیهای مورد نظر را به شما نمایش میدهد.
- Set value: در این قسمت مقداری را برای کانتر بهصورت یک عدد ثابت یا رجیستری تعیین کنید. چنانچه حدی برای انکودر در نظر ندارید، میتوانید همان مقدار 1 را برای آن در نظر داشته باشید. اگر انکودر به این مقدار رسید، برای اینتراپت از آن در قسمت بعد استفاده کنید که این قسمت زیاد مورد استفاده قرار نمیگیرد.
- Counting Direction: این بخش در انکودر غیر فعال است؛ به این دلیل که در انکودر با وجود پالس B جهت گردش یا شمارش بالا یا پایین تعیین میشود. در این صورت، کانتر برای حالت تک فاز یا تک ورودی فعال میشود.
- Counting Mode: در این قسمت میتوان تعیین کرد که پالسها بهصورت نرمال شمارش شود یا با ضریب 2 یا 4 شمارش شوند. پس از تنطیم موارد فوق گزینه NEXT را بزنید و صفحه زیر را نمایش میدهد.
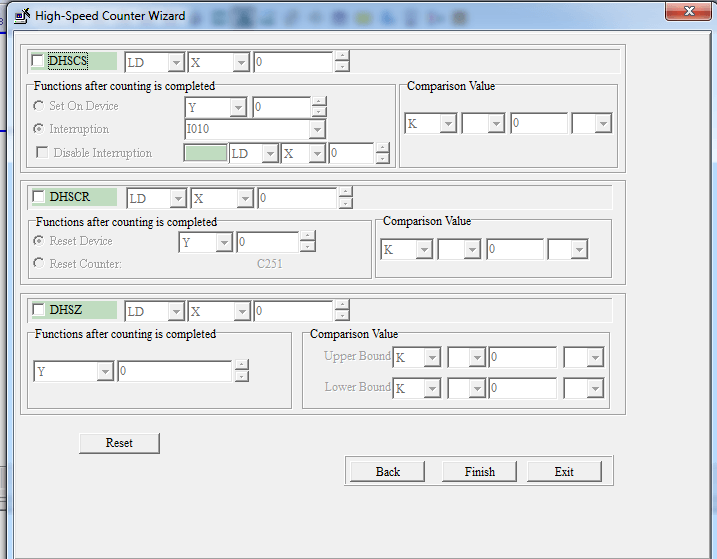
جدول بالا در مواقع خاص استفاده میشود که اگر نیازی به استفاده از موارد خاص کانتر نباشد، گزینه Finish را کلیک کنید. اگر با خطایی در نرم افزار WPLSOFT مواجه شدید، میتوانید آن خطا را از نظر نرم افزاری یا سخت افزاری بررسی کنید. در صورت نیاز میتوانید برای عیب یابی و تعمیر پی ال سی دلتا اقدام کنید.
فانکشن DHSCS در نرم افزار WPLSOFT
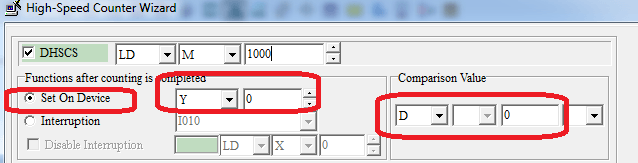
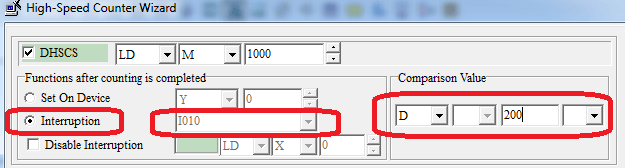
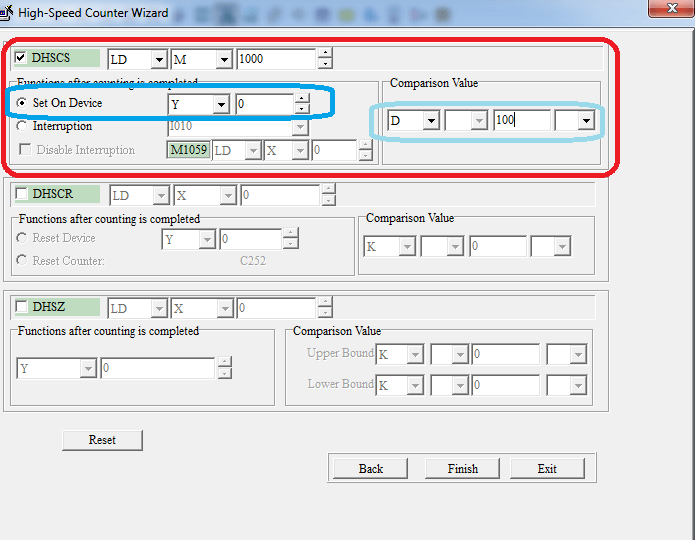
اگر بخواهید مقدار کانتر به مقدار خاصی برسد، از این فاکشن DHSCS استفاده کنید. اگر خروجی سخت افزاری یا بیت مموری یا یک استپ لدر فعال شود، در بخش Set on device شماره خروجی مورد نظر را تعیین کنید. چنانچه بخواهید چندین خط برنامه اجرا شود، اینتراپت مخصوص این کانتر را فعال کنید و تیک Interruption را بزنید. یک مقدار خاص را تعیین کنید که انکودر به این مقدار خاص برسد یا رجیستر خاصی را تعیین کنید که مقادیر متفاوتی را داخل این رجیستر منتقل شود.
برای این منظور مقدار یا شماره رجیستر را برای عمل مقایسه تعیین کنید و مقدار کانتر انکودر را در بخش Comparison Value تعیین کنید. اگر اینتراپت را فعال کردید، میتوانید در انتها، برنامه اینتراپت مورد نظر را بنویسید. مقدار کانتر C251 با مقداری که در رجیستر D0 ریخته شود، برابر شود، آنگاه خروجی Y0 ست SET میشود.
مقدار کانتر C251، هنگامی که با مقدار رجیستر D200 برابر شد، اینتراپت I010 اجرا شود.
فانکشن DHSCR
اگر بحواهید یک خروجی سخت افزاری یا یک بیت مموری یا یک استپ لدر را ریست کنید، از این فاکشن DHSCR استفاده کنید. در برخی از مدلهای plc میتوان بخش کانتر را نیز Reset کرد. در بخش Comparison Value یک مقدار عددی ثابت یا رجیستر را تعیین کنید که کانتر انکودر اگر به آن مقدار برسد، خروجی مورد نظر ریست شود. همچنین در برخی از مدلهای پی ال سی دلتا نیز کانتر ریست میشود. اگر مقدار کانتر به مقداری که در رجیستر D100 رسید و برابر با مقدار آن شد، خروجی Y1 ریست شود.

فانکشن DHSZ
در این فاکنشن اینتراپت را نمیتوان فعال نمود یا کانتر را ریست کرد؛ فقط میتوان 3 خروجی سخت افزاری یا بیت مموری یا استپ لدر را تعیین کرد. اگر یک محدوده بالا و پایین یا یک window برای مقدار کانتر تعیین شود و آدرس اولین خروجی تعیین شود. 2 خروجی متوالی بهصورت زیر فعال میشود.
- اگر مقدار کانتر از مقدار Low کمتر بود، اولین آدرس خروجی فعال میشود.
- چناچه مقدار کانتر مابین مقادیر LOW و UP بود، دومین آدرس خروجی فعال میشود.
- اگر مقدار کانتر بیشتر از مقدار UP بود، سومین آدرس خروجی فعال میشود.
اگر کانتر C251، کمتر از 10000 باشد، خروجی Y0 فعال شود. چناچه مابین 10000 تا 20000 باشد، خروجی Y1 فعال میشود. اگر بیشتر از 20000 باشد، خروجی Y2 فعال میشود. فانکشن DHSZ را تنظیم کنید.
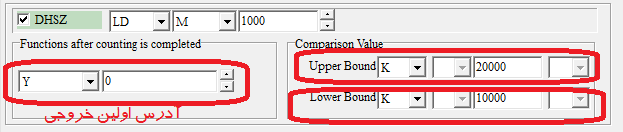
برای مقادیر Upper Bound و Lower Bound میتوان رجیستر متغیر تعیین کرد. چنانچه مدل plc دلتا را sv یا sv2 انتخاب کنید و گزینه High speed counter را بزنید.
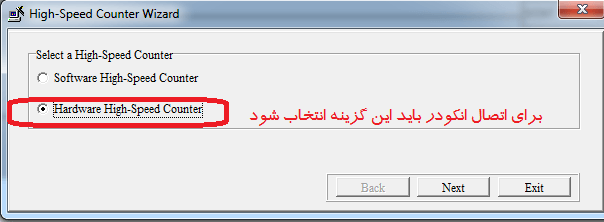
برای اتصال انکودر Hardware High speed counter انتخاب شود و گزینه NEXT کلیک شود.
برای اتصال انکودر باید گزینه 2-phase inputs انتخاب شود. پس از تنظیمات، در این مدل plc برای 4 کانتر C251 تا C254 و 2 ورودی RESET و START سخت افزاری نیز تعیین میشود.
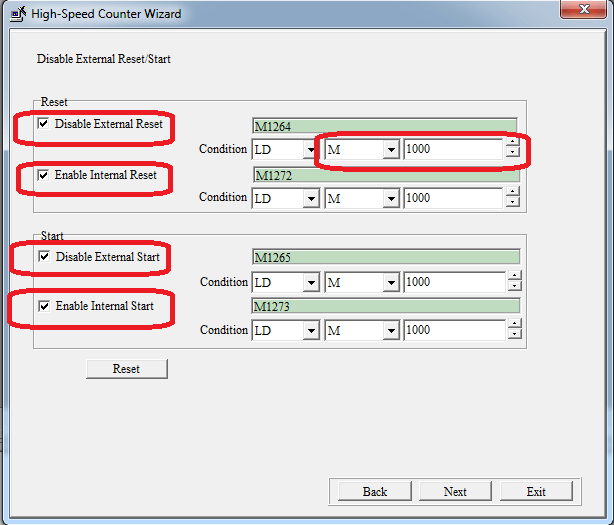
اگر ورودیهای سخت افزاری RESET و START را غیر فعال کنید و کانترهای مدلهای plc از برنامه ریست کنید و کانتر همواره فعال باشد؛ باید تیک هر 4 مورد بالا را بزنید و با بیت فعال M1000 فلگهای خاص را SET کنید.
نکته مهم: مقایسه کنندههای ساده در برنامه به دلیل سرعت بالا پالسهای انکودر نمیتواند دقیق عمل کند. حتما باید از فانکنشنهای DHSCS و DHSCR و DHSZ استفاده شود.
با تنظیم همه موارد، گزینه Finish را بزنید و تمامی دستورات لازم بهطور اتوماتیک به برنامه اضافه میشود.
مثال 1) محاسبه سرعت خطی با اتصال انکودر به پی ال سی دلتا
یک انکودر با رزولوشن 1000 به یک محور طولی در دستگاه CNC به یک plc 14SS2 دلتا متصل است. اگر به ازای 1250 پالس از انکودر معادل یک میلی متر حرکت داشته باشد؛ آنگاه موارد زیر را محاسبه کنید.
- سرعت خطی محور بر حسب میلی متر بر دقیقه
- پوزیشن محور برحسب میلی متر
این مثال هم سرعت و هم پوزیشن را میخواهد؛ بنابراین باید از کانتر High speed استفاده شود. اگر فقط سرعت را میخواست، از دستور SPD میتوانستید استفاده کنید تا فرکانس پالس انکودر را محاسبه شود و بر حسب میلی متر بر دقیقه اسکیل کرد.
نکته خیلی مهم: استفاده هم زمان دستور SPD و High speed counter برای یک ورودی در plc دلتا مجاز نیست.
کانتر High speed طبق Wizard زیر تنظیم شود و گزینه Next کلیک شود. در صفحه بعد، نیازی به تنظیمات خاصی نیست و گزینه Finish انتخاب شود.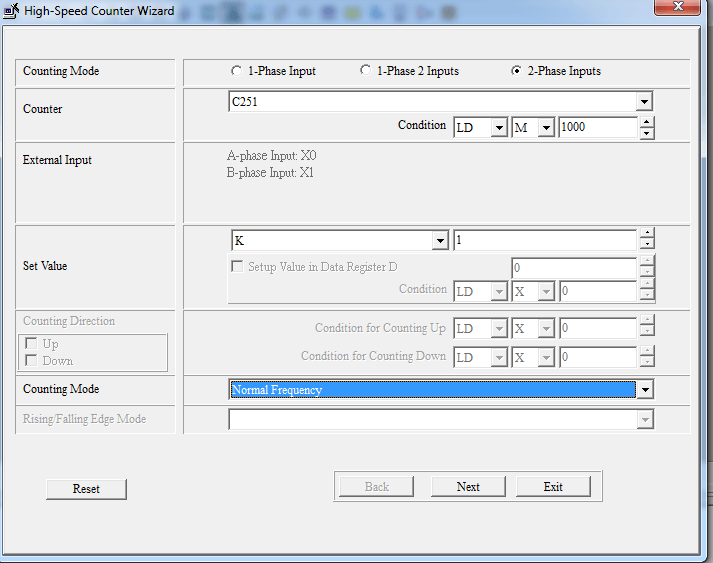
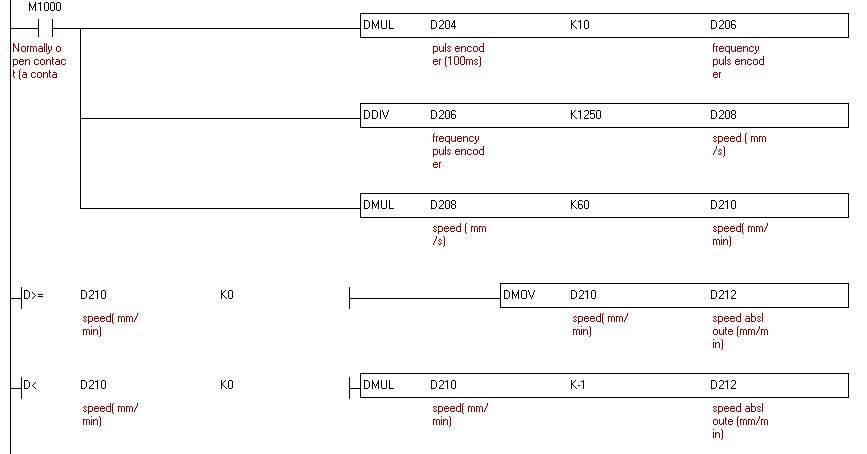
دستور زیر در برنامه نوشته میشود. پالس A انکودر به ورودی X0 و پالس B انکودر به ورودی X1 متصل شود.

مقدار پالسهای انکودر را در کانتر C251 قرار دارد و اگر محور در جهت مثبت حرکت کند، کانتر افزایشی خواهد بود. اگر در جهت خلاف حرکت کند، کانتر کاهشی خواهد بود. برای محاسبه پوزیشن اگر مقدار کانتر بر ضریب تقسیم شود، مقدار پوزیشن بهدست میآید. پس مقدار کانتر C251 بر 1250 تقسیم شود و حاصل به رجیستر D100 منتقل میشود و این مقدار بر حسب میلی متر است.

محاسبه سرعت خطی مثال 1)
برای محاسبه سرعت خطی، باید فرکانس پالسهای انکودر محاسبه شود. با استفاده از بیت M1012 (بیت کلاک مموری با پریود زمانی 100 میلی ثانیه) یک کانتر معمولی شمارش شود. در 100 میلی ثانیه اول، عدد مربوط به کانتر انکودر C251 را در رجیستر D200 منتقل شود.
در 100 میلی ثانیه دوم مقدار کانتر انکودر C251 در رجیستر دیگر D202 منتقل شود (رجیسترها 32 بیتی هستند). اگر این دو رجیستر D202 و D200 تفریق شوند و اختلاف این دو، تعداد پالسهای شمارش شده انکودر در فاصله زمانی 100 میلی ثانیه است. حاصل این تفریق به رجیستر D204 منتقل میشود و کانتر کمکی ریست میشود.
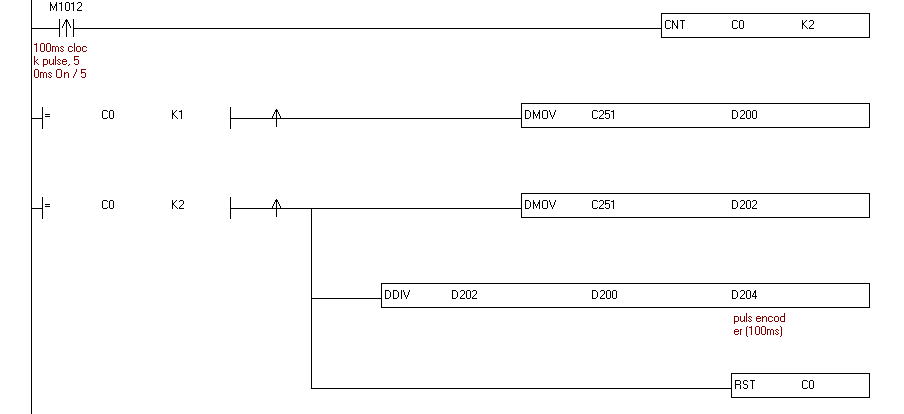
گذاشتن لبه بالا برای مقایسه کنندهها و بیت M1012 ضروری است؛ در غیر این صورت محاسبه به درستی انجام نمیشود.
با تعداد پالس انکودر در فاصله زمانی 100 میلی ثانیه میتوان فرکانس پالس انکودر را بهدست آورد. رجیستر D204 در عدد 10 ضرب شود و حاصل در رجیستر D206 ذخیره کند. فرکانس را بر 1250 پالس تقسیم کرد و سرعت خطی را بر حسب میلی متر بر ثانیه بهدست آورد. حاصل به رجیستر D208 منتقل میشود و اگر این سرعت در 60 ضرب شود، مقدار جواب مسئله است. سرعت بر حسب میلی متر بر دقیقه و به رجیستر D210 منتقل میشود.
سرعت منفی یا مثبت است؛ چون کانتر در حال افزایش یا کاهش است. دو خط پایانی برنامه مربوط به قدر مطلق رجیستر D210 است و رجیستر D210 با عدد صفر مقایسه میشود. اگر رجیستر از صفر بزرگتر بود که مقدار سرعت مثبت است و مقدار به رجیستر D212 منتقل میشود. اگر رجیستر از عدد صفر کوچکتر بود، مقدار سرعت منفی است و در عدد 1- ضرب میشود. در این حالت حاصل مثبت شود و به رجیستر D212 منتقل میشود.
مثال 2) نحوه اتصال انکودر به پی ال سی دلتا
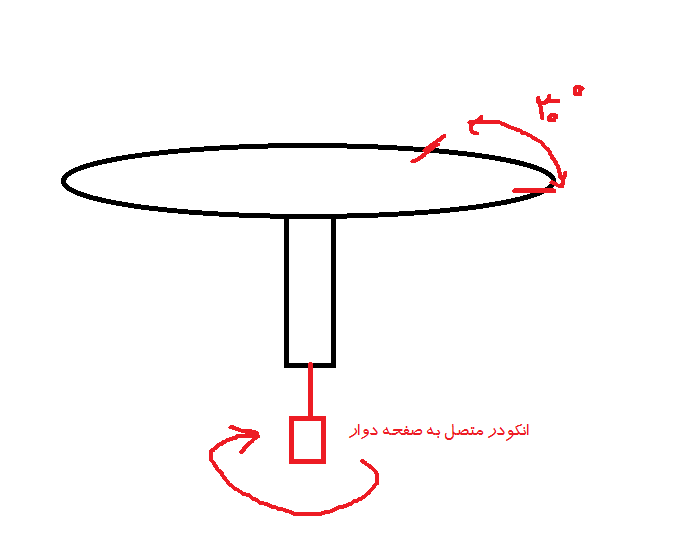
یک صفحه دوار به محور یک انکودر مستقیما کوپل است. رزولوشن این انکودر 2500 پالس است. این انکودر به یک PLC 12SA2 متصل است و به ازای هر 30 درجه حرکت محور، یک شیر برقی به مدت 500 میلی ثانیه فعال میشود. این شیر برقی به خروجی Y0 متصل است. (پالس A و B و Z انکودر موجود است).
حل: به ازای یک دور چرخش، محور انکودر هم یک دور میچرخد. پالس Z انکودر به پایه RESET سخت افزاری کانتر High Speed (کانتر C252) متصل شود. پالس A به X0 و پالس B به X1 و پالس Z انکودر به X4 متصل شود. تنظیمات High Speed Counter بهصورت زیر انجام شود.
در این کانتر دو نوع counting mode با ضریب 2 و ضریب 4 دارد. هر دور چرخش محور، انکودر 2500 پالس میدهد و با ضریب 2 شمارش میشود؛ یعنی در هر یک دور تعداد 5000 پالس شمارش میشود. پالس z هر دور یک بار فعال میشود و به پایه reset کانتر متصل است. بهطور اتوماتیک کانتر C251 ریست میشود و نیازی به ریست نرم افزاری ندارد. اگر بخواهید هر 30 درجه خروجی Y0 را SET شود، از فانکشن DHSCS در کانتر High speed استفاده شود.
با تنظیم فانکشن DHSCS مطابق شکل، گزینه finish کلیک شود.
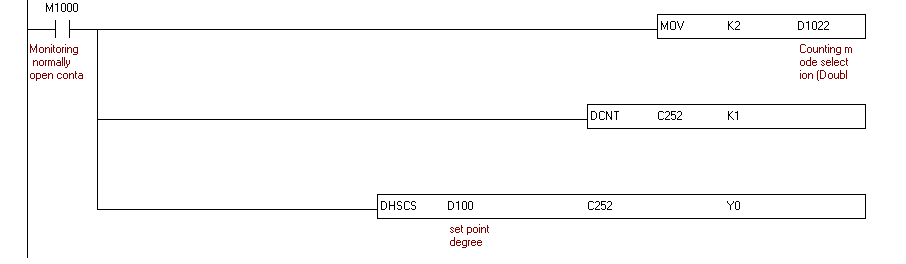
هر 30 درجه حرکت ست پوینت جدید را بهصورت پالس محاسبه میکند. زوایای مختلف را بهعنوان ست پویت زاویه در رجیستر D100 منتقل شود. کل پالس حرکت در یک دور معادل 360 درجه است که معادل 5000 پالس میشود.
13.88 = 5000 / 360
416.4 ~ 417 = 13.88 * 30
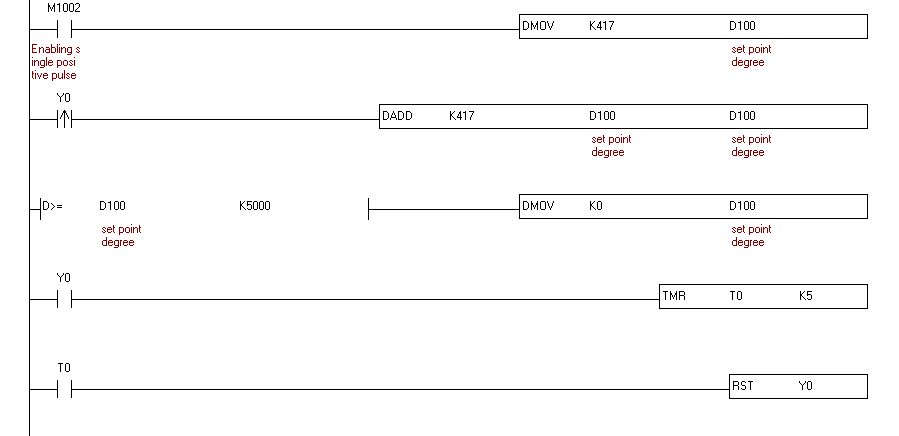
فعال شدن لبه بالا، هر بار خروجی به رجیستر D100 ست پوینت درجه 417 واحد اضافه میکند. اگر بزرگتر از 5000 شد، عدد صفر مجدد داخل رجیستر منتقل میشود. برای شروع حرکت با بیت M1002 سیکل اول plc فعال میشود، عدد 167 را در رجیستر D100 منتقل کرد. به ازای حرکت معادل 30 درجه، فانکشن DHSCS اجرا میشود و خروجی Y0 فعال میگردد. میتوان با یک تایمر به مدت 500 میلی ثانیه پس از فعال شدن، خروجی Y0 را ریست کرد تا مجددا خروجی Y0 با فانکشن DHSCS ست شود.
مثال 3) محاسبه حرکت نوار نقاله با اتصال انکودر به PLC دلتا
یک انکودر با رزولوشن 2000 پالس به محور یک نوار نقاله و پالسهای انکودر را به PLC 14SS2 دلتا متصل است. به ازای ست پوینتی که اپراتور از روی HMI هر بار تعیین میکند، هر x سانتی متر نوار نقاله از حرکت بایستد (خروجی Y0 ریست شود) و همزمان شیر برقی (خروجی Y1) به مدت یک ثانیه فعال شود و مجددا نوار نقاله شروع به حرکت کند (خروجی Y0) فعال شود. هر یک میلی متر حرکت معادل 250 پالس انکودر است. پالس A انکودر را به ورودی X0 و پالس B انکودر را به ورودی X1 متصل است. اپراتور عدد صحیحی بر حسب سانتی متر در رجیستر D500 وارد میکند)
برای این مثال به دلیل اینکه یک خروجی در یک ست پوینت مشخص set باید شود و یک خروجی باید Reset شود. باید فانکشن DHSCS و فانکشن DHSCR هر دو فعال شوند.
ابتدا کانتر C251 برای انکودر تنظیم شود.

برای دقت بیشتر، بخش Counting Mode را روی حالت Four Times frequency قرار بگیرد و پالسها را با ضریب 4 شمارش میکند. تنظیمات فانکشنهای DHSCS و DHSCR را بهصورت زیر تنظیم شود.
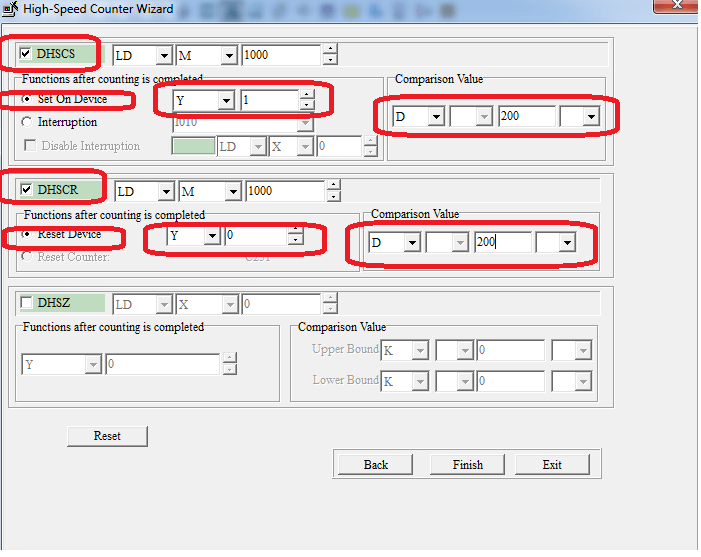
رجیستر D200، رجیستر ست پوینتی است که کانتر C251 با آن مقایسه میشود. برای محاسبه مقدار رجیستر D200، ابتدا رجیستر ست پوینت HMI یعنی D500 را در ضریب مورد نظر ضرب شود و حاصل در D200 منتقل شود.
محاسبه ضریب پالس مثال 3
طبق صورت مسئله، هر 250 پالس معادل یک میلی متر است. کانتر C251 با ضریب 4، پالسهای انکودر را شمارش میکند. به ازای هر 1000 واحد (250 *4) شمارش شود. عدد ست پوینت بر حسب سانتی متر است؛ پس در ضریب 10 نیز ضرب میشود و در نتیجه (10000= 1000*10) هر 10000 واحد شمارش معادل یک سانتی متر است. باید رجیستر D500 که بر حسب سانتی متر است. همواره در عدد 10000 ضرب شود و حاصل در رجیستر D200 منتقل شود.
همچنین باید کانتر C251 پس از ریست شدن Y0، ریست شود. بنابراین با غیر فعال شدن Y0 میتوان کانتر C251 را نیز ریست کرد و با فعال شدن خروجی Y1 یک تایمر به مدت 1 ثانیه قرار گیرد. پس از آن هم خروجی Y1 را ریست نماید و مجددا نوار نقاله را که خروجی Y0، را فعال کند.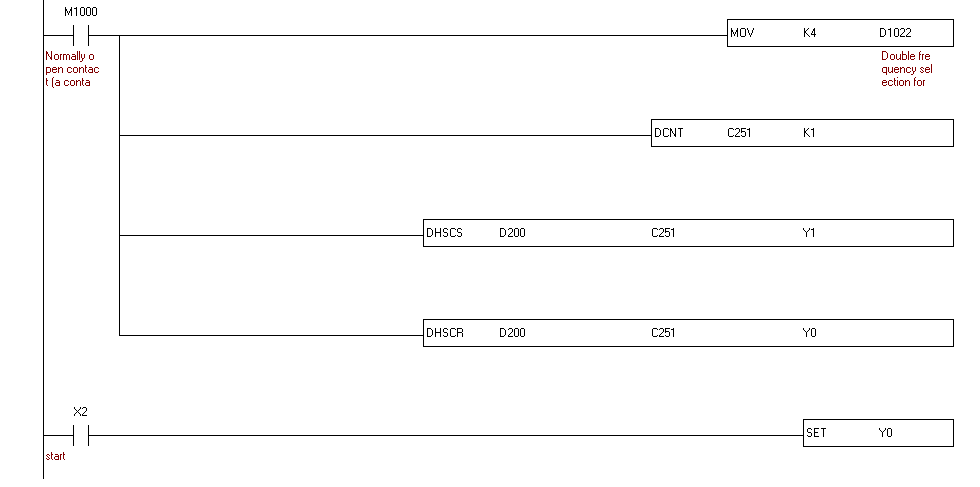
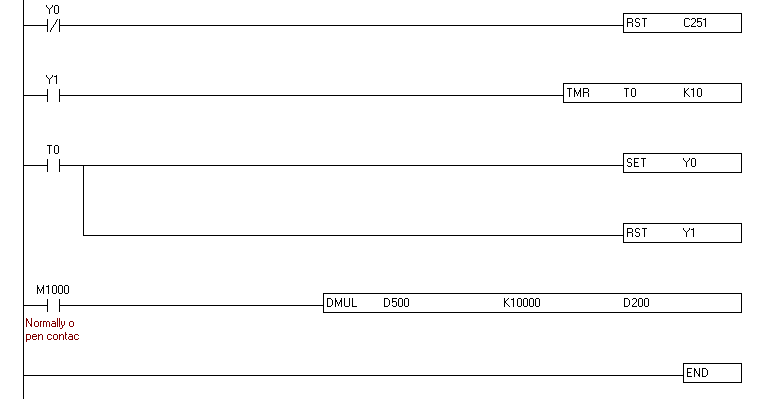
در برنامه بالا ورودی X2 به عنوان پوش باتن استارت، حرکت نوار نقاله در نظر گرفته میشود.
مثال 4) محاسبه پوزیشن محور با اتصال انکودر به پی ال سی دلتا
یک انکودر را به یک محور متصل و پالسهای A و B به یک PLC 12SE دلتا متصل است و رزولوشن انکودر 1000 پالس است. به ازای هر 400 پالس یک میلی متر حرکت میکند. به ازای هر 5 سانتی متر حرکت 300 واحد به مقدار رجیستر D200، اضافه میشود. همچنین خروجی های Y0 و Y1 به ترتیب یکی 500 میلی ثانیه و دیگری 300 میلی ثانیه فعال میشود. پوزیشن محور در رجیستر D100 بر حسب میلی متر نمایش میدهد.
پالس A انکودر به ورودی X0 و پالس B انکودر به ورودی X1 متصل شود.
ابتدا تنظیمات کانتر High speed انجام شود.
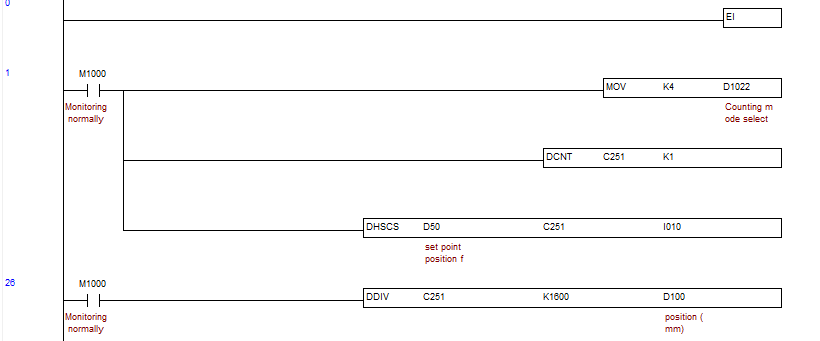
برای دقت بیشتر counting Mode روی حالت 4-Time Frequency قرار گیرد، با ضریب 4 پالسها شمارش میشود. در هر یک دور انکودر، 4000 پالس شمارش میشود. (4*1000)
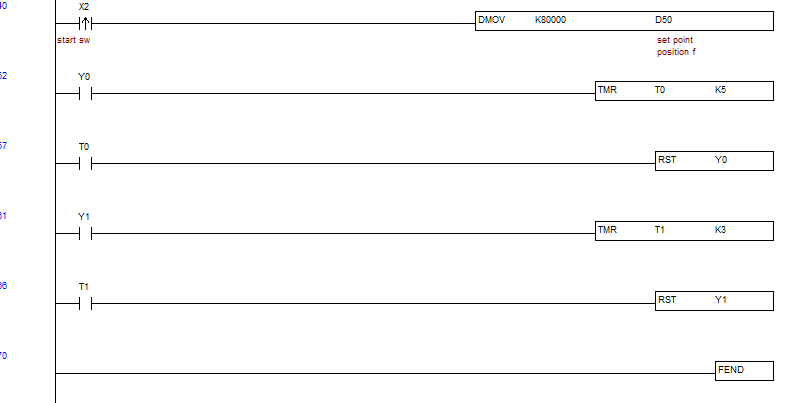
این بار باید در فانکشن DHSCS باید از اینتراپت مخصوص کانتر High speed استفاده شود. از اینتراپت شماره I010 استفاده میشود و در صفحه بعد، تنظیمات DHSCS در شکل مشخص است.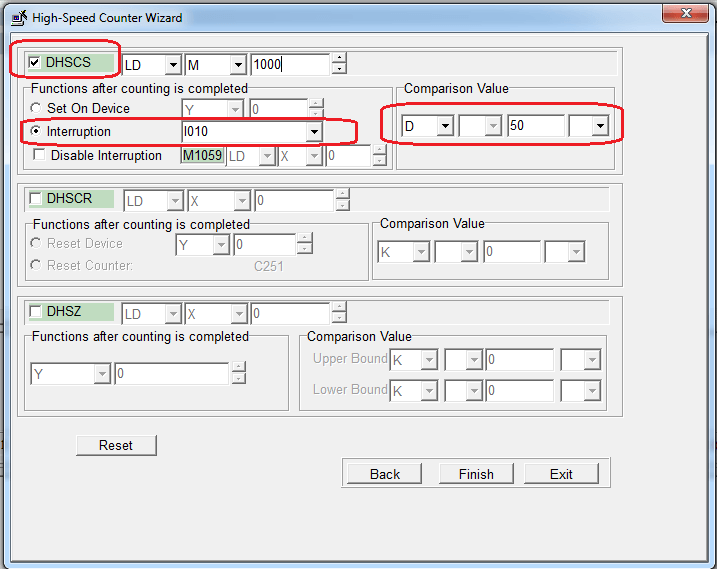
مقدار مقایسه برای هر بار پوزیشن به رجیستر D50 منتقل کرد. برای محاسبه پوزیشن آنلاین،ضریب مناسب به دست آورده شود. طبق صورت مسئله، هر 400 پالس معادل یک میلی متر حرکت محور است و پالسها با ضریب 4 شمارش میشود. هر 1600 پالس معادل یک میلی متر خواهد بود. اگر رجیستر کانتر بر عدد 1600 تقسیم شوند حاصل پوزیشن محور خواهد بود که بر حسب میلی متر نمایش داده میشود . این مقدار در رجیستر D100 منتقل شود.
میزان پالسها به ازای 5 سانتی متر حرکت را به دست آورده شود که هر بار این میزان در اینتراپت برای 5 سانتی متر بعدی در رجیستر D50 منتقل شود. کانتر با این رجیستر مقایسه شود و اینتراپت I010 اجرا شود.
10 = 5 (cm) × 50 (mm)
1600 = 50( mm) × 80000
هر بار 80000 را به رجیستر D50 منتقل شود و این عمل جمع باید در هر بار اینتراپت اجرا شود. در برنامه اینتراپت باید ابتدا خروجیهای Y0 و Y1 ست شوند و به رجیستر D50 میزان 80000 اضافه شود. برای بار اول با شروع دکمه استارت 80000 در رجیستر D50 بارگذاری شود. در خط اصلی برنامه تایمرهای T0 و T1 برای ریست خروجیهای Y0 و Y1 درنظر گرفته شود.
آموزش پی ال سی دلتا همراه با پشتیبانی دائمی و ارائه مدرک معتبر به کارآموزان در مجموعه نیک صنعت توسط اساتید مجرب و متخصص برگزار میشود، جهت کسب اطلاعات بیشتر با شماره تلفن 87700210-021 تماس بگیرید.


































































































خیلی عالی فقط بگید یک موتور القایی چگونه سر مقدار تعریف شده توقف کند
با سلام و وقت بخیر خدمت شما
برای توقف موتور القایی در موقعیت تعریفشده، باید فقط انکودر آن را به کانتر High-Speed سختافزاری در PLC دلتا (کانترهای C251 تا C254) متصل کنید و در نرمافزار WPLSoft با استفاده از فانکشنهایی مانند DHSCS یک نقطه حدی تعریف کنید تا هنگام رسیدن انکودر به آن نقطه، خروجی یا اینتراپت دلخواه فعال شود