دفترچه راهنمای درایو GD270 اینوت
درایو GD270 سری VFD را نشان میدهد که یک VFD بهینه شده ویژه برای فن و پمپ است. ساده و […]

- کد تعیین مدل درایو GD270 اینوت
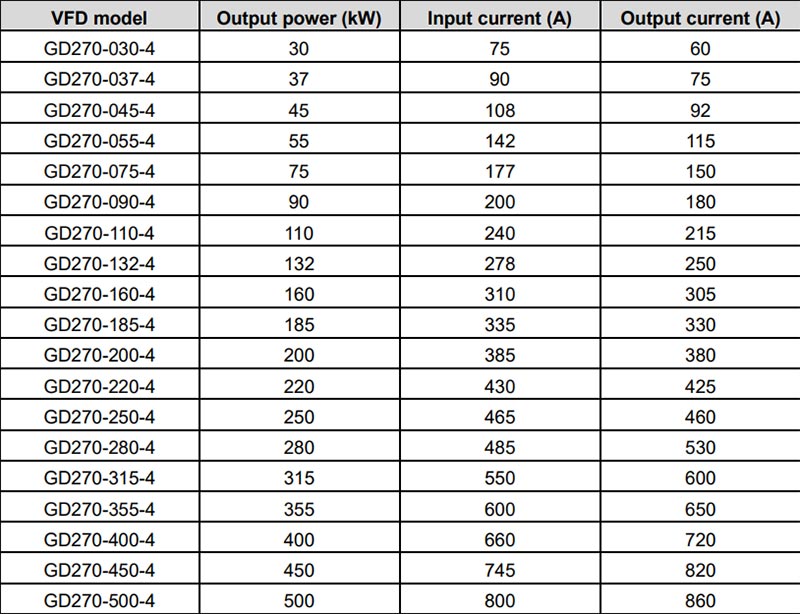
- رتبهبندی محصولات:
- نمودار ترمینال اصلی برای سه فاز 380V , 110 – 132 KW
- روش سیمکشی برای ترمینالهای مدار اصلی
- سیم کشی استاندارد مدار کنترل
- نحوه کارکرد صفحه کلید اینورتر GD270 اینوت
- کلیدهای کیپد درایو GD270 اینوت
- گروه P01 - کنترل start و stop
- گروه P02 - پارامترهای موتور1
- گروه P05 ترمینال های ورودی
- گروه P06 – ترمینال های خروجی
- گروه P09 - کنترل PID
- گروه P14 - ارتباط سریال
- گروه P19- وضعیت کارت های توسعه
- گروه P25 — توابع ورودی کارت I/O
- گروه P26__عملکردهای خروجی کارت I/O
- گروه P93 - کنترل آتش
- راههای ارتباطی نیک صنعت:
درایو GD270 سری VFD را نشان میدهد که یک VFD بهینه شده ویژه برای فن و پمپ است. ساده و آسان برای استفاده، VFD میتواند فنها و پمپها را در صنایع تصفیه فاضلاب، HVAC، شیمیایی، متالورژی، برق و سایر صنایع کنترل کند. با استفاده از فناوریهای پیشرفته کنترل برداری، VFD میتواند موتورهای سنکرون (SM) و موتورهای آسنکرون (AMs) را در شرایط کاری پیچیده مختلف به حرکت درآورد. علاوه بر این، VFD با ماکروهای مختلف کاربرد فن و پمپ، مانند PID، کنترل چند پمپ، تامین آب با فشار ثابت تعبیه شده است که به مهندسان در عیبیابی تجهیزات کمک زیادی میکند.
این دفترچه راهنما به شما نحوه نصب، سیم کشی، تنظیم پارامترها، تشخیص و حذف عیوب و نگهداری VFD را آموزش میدهد. قبل از نصب VFD، این کتابچه راهنمای کاربر را به دقت بخوانید تا از نصب و اجرای صحیح با عملکرد های مناسب و قدرتمند اطمینان حاصل کنید.
| توضیحات | مشخصات فنی | |
| برق ورودی | ولتاژ ورودی | AC 3PH 380–480V ، ولتاژ نامی: 380 |
| نوسانات گذرا ولتاژ مجاز |
-15% – +10% | |
| جریان ورودی (A) | به بخش رتبهبندی محصولات مراجعه کنید. | |
| فرکانس ورودی (HZ) |
50(HZ) یا 60(HZ) محدوده مجاز: 47-63 HZ |
|
| توان خروجی | ولتاژ خروجی (V) | 0-ولتاژ ورودی |
| جریان خروجی ((A | به بخش رتبهبندی محصولات مراجعه کنید. | |
| توان خروجی (KW) | به بخش رتبهبندی محصولات مراجعه کنید. | |
| فرکانس خروجی(HZ) | 0–400Hz | |
| عملکرد کنترل فنی | حالت کنترل | وکتور کنترل بدون سنسور |
| نوع موتور | موتور آسنکرون(AM) و موتور سنکرون(SM) | |
| نسبت سرعت | برای موتورهای آسنکرون(AM): 1:200(SVS) برای موتورهای سنکرون (SM): (SVS) 1:20 |
|
| دقت کنترل سرعت | ± 0.2% (SVC) | |
| نوسان سرعت | ± 0.3% (SVC) | |
| پاسخ گشتاور | < 20=”” میلی=”” ثانیه=””>(SVC) | |
| دقت کنترل گشتاور | ± 10% (SVC) | |
نیک صنعت به عنوان یکی از نمایندگی اینوت در ایران اقدام به انتشار دفترچهراهنماهای فارسی درایوهای اینوت و انتشار آموزشهای ویدئویی رایگان کرده است. برای استعلام قیمت، خرید و تعمیرات اینورتر GD270 اینوت، با شماره تلفن 87700210 تماس حاصل فرمایید.
| گشتاور راه اندازی | برای آسنکرونها: 0.5Hz/150% (SVC) برای سنکرونها: 2.5Hz/150% (SVC) |
|
| ظرفیت اضافه بار | می تواند با 110٪ جریان نامی به مدت 1 دقیقه کار کند و اضافه بار برای هر 5 دقیقه مجاز است. | |
| عملکرد کنترل در حال اجرا | روش تنظیم فرکانس | تنظیمات را می توان از طریق دیجیتال ، آنالوگ، فرکانس پالس، سرعت اجرا چند مرحله ای، PLC ساده، PID، ارتباطات پیاده سازی کرد. تنظیمات را می توان ترکیب کرد و کانال های تنظیم را می توان تغییر داد. |
| تنظیم خودکار ولتاژ | ولتاژ خروجی را می توان ثابت نگه داشت اگرچه ولتاژ شبکه تغییر می کند. | |
| حفاظت از خطا | بسیاری از عملکردهای حفاظتی موجود، مانند محافظت در برابر اضافه جریان، اضافه ولتاژ، افت ولتاژ، دمای پیش از حد، کاهش فاز | |
| برای اجرای راه اندازی نرم بدون ضربه برای موتورهای دوار استفاده می شود | ||
| رابط جانبی | دقت ترمینال آنالوگ ورودی | بیش از 20 میلی ولت نیست |
| دقت ترمینال دیجیتال ورودی | بیش از 2 میلی ثانیه نیست | |
| آنالوگ ورودی | دو ورودی: AI1: 0(2)–10V / 0(4)–20mA; AI2: -10 – +10V | |
| خروجی آنالوگ | دوخروجی: AO0/AO1: 0(2)–10V/0(4)–20mA | |
| ورودی دیجیتال | پنج ورودی معمولی. حداکثر فرکانس: 1kHz ; امپدانس داخلی: kΩ 3.3 یک ورودی با سرعت بالا حداکثر فرکانس: kHz 50 |
کد تعیین مدل درایو GD270 اینوت
کد تعیین مدل حاوی اطلاعات محصول است. می توانید کد تعیین مدل را در پلاک VFD و پلاک ساده شده پیدا کنید. حتما قبل از خرید درایو اینوت به مشخصات روی پلاک و توان اینورتر توجه لازم را داشته باشید.
| شرح | علامت | توضیحات | محتوا |
| نام سری محصول | 1 | نام سری محصول | درایو ایونت سری GOOD DRIVE مدل 270 مختص کاربری فن و پمپ |
| توان نامی | 2 | محدوده توان | 160: 160kW |
| کلاس ولتاژ | 3 | کلاس ولتاژ | 4: AC 3PH 380V–480V ولتاژ نامی: 380 ولت |
| شماره آپشن | 4 | اختیاری | پیش فرض: خالی L1 : با راکتور DC داخلی ، قابل استفاده برای مدلهای 30-355 KW L2: با راکتور خروجی AC ، قابل استفادهKW 220 و مدلهای بالاتر L3 : با راکتور DC داخلی و راکتور AC خروجی، قابل استفاده برای مدلهایKW 220 و بالاتر نکته: راکتورهای DC قطعات استاندارد برای مدل های 400-500 کیلووات هستند |
رتبهبندی محصولات:
نمودار ترمینال اصلی برای سه فاز 380V , 110 – 132 KW
نمودار ترمینال اصلی برای سه فاز 380V , 160 – 220 KW
| توضیحات | |
| R , S , T | ترمینالهای ورودی سه فازAC ، اتصال به شبکه |
| U , V , W | ترمینالهای خروجی سه فاز AC که در اکثر موارد به موتور متصل میشود. |
| (+) | (+) و (-) به ترمینال ترمز خارجی یا مشترک باس DC وصل می شود. (+) به ترمینال مقاومت ترمز خارجی متصل میشود. |
| (-) | |
| PE | ترمینال زمین برای حفاظت ایمن است ، هر دستگاه باید دوتا PE داشته باشد. ترمینال و زمین مناسب مورد نیاز است. |
- از کابلهای موتور نامتقارن استفاده نکنید، اگر یک هادی متقارن زمین در کابل موتور در کنار لایه محافظ رسانا وجود داشته باشد، هادی زمین روی انتهای VFD و انتهای موتور زمین کنید.
- کابل موتور، کابل برق ورودی، کابل کنترل را جداگانه مسیریابی کنید.
- (+) و (-) برای چندین VFD که باس DC را به اشتراک میگذارند، استفاده میشوند. اما این پورت ها برای ورودی برق DC استفاده نمیشوند.
روش سیمکشی برای ترمینالهای مدار اصلی
1- اتصال به زمین کابل برق ورودی را به ترمینال اتصال به زمین (PE) VFD وصل کنید، و کابل ورودی سه فاز را به R , S , T وصل کنید.
2- سیم زمین کابل موتور را به ترمینال PE VFD وصل کنید و کابل را به ترمینالهای U , V , W وصل کنید و محکم کنید.
3- قطعات اختیاری مانند مقاومت ترمز که کابلها را به موقعیتهای تعیین شده حمل میکند وصل کنید.
4- در صورت اجازه، تمام کابلهای خارج از VFD را به صورت مکانیکی محکم کنید.
سیم کشی استاندارد مدار کنترل
سیم کشی استاندارد مدار کنترل و نقشه سیمکشی مدار کنترل اصلی شامل موارد زیر است:
نمودار سیم کشی مدار کنترل
| ترمینال | توضیحات | |
| +10 | منبع تغذیه +10.5 ولت | |
| AI1 | رنج ورودی:برای AI1 , 0(2) – 10 V یاmA 0(4) – 20 برای AI2 , -10V _ +10V امپدانس ورودی:kΩ 20 برای ورودی ولتاژ، Ω 250 برای ورودی جریان،اینکه آیا ولتاژ یا جریان برای ورودی استفاده شود از طریق جامپر J11 تنظیم میشود. دقت: mV 5 زمانی کهV 10 باV 50 مطابقت دارد. انحراف:% 0.05± در 35°C . زمانی که ورودی بالاتر از 5V /10mA است. |
|
| AI1 | ||
| GND | پتانسیل صفر مرجع 10.5 V | |
| AO0 | رنج خروجی: 0(2) – 10 V یا 0(4) – 20 mA اگرچه ولتاژ یا جریان برای خروجی AO0 یا AO1 استفاده میشود از طریق جامپرهای J6 و J7 تنظیم میشود. خطا: ± 0.5٪ وقتی خروجی 5 ولت در 25 درجه سانتیگراد است. |
|
| AO1 | ||
| RO1A | RO1 خروجی; RO1A: تیغه باز NO ; RO1B: NC تیغه بسته ; RO1C: مشترک رله حداکثر جریان تیغه: 3A/AC 250V , 1A/DC30V |
|
| RO1B | ||
| RO1C | ||
| COM | ترمینال مشترک +24 ولت | |
| Y1 | جریان مجاز: 50ma/ 30V رنج فرکانس خروجی: 0-1 HZ به حالت سوئیچJ10 توجه شود!اگر روی Y10 باشد یعنی Y10 فعال است و در غیر این صورت ورودی S4 می باشد. |
|
| +485 | پورت ارتباطی 485، پورت سیگنال دیفرانسیل RS485 و استاندارد RS485 پورت ارتباطی باید ار جفت شیلد پیچ خورده استفاده کند.مقاومت تطبیق ترمینال 120 اهم برای ارتباط با RS485 از طریق جامپر J8 متصل میشود. |
|
| -485 | ||
| PE | ترمینال اتصال به زمین | |
| PW | پایه مشترک وودی دیجیتال(درصورت استفاده از منبع داخلی پایه 24V به پایه PW متصل کنید. در صورت استفاده از منبع خارجی،ولتاژ مثبت منبع تغذیه را به پایه PW متصل نمایید.( | |
| 24V | منبع تغذیه کاربر ارائه شده توسط VFD . حداکثر جریان خروجی: 200mA | |
| COM | ترمینال مشترک +24 ولت | |
| S1 | دیجیتال ورودی 1 | 1. امپدانس داخلی:3.3 KΩ 2. ولتاژ ورودی قابل قبول 12-24V 3.ترمینال ورودی دوجهته،ازهردو NPN و PNPپشتیبانی میکند 4.حداکثر فرکانس ورودی 1KHZ 5.همه ترمینالهای دیجیتال ورودی قابل برنامه ریزی هستند، توابع که از طریق کدهای تابع قابل تنظیم است. 6. انتخاب Y1 یا S4 از طریق J10 |
| S2 | دیجیتال ورودی 2 | |
| S3 | دیجیتال ورودی 3 | |
| S4 | دیجیتال ورودی 4 | |
| HDIA | علاوه بر عملکردهای ورودی دیجیتال،ترمینال میتواند به عنوان یک کانال ورودی پالس فرکانس بالا نیز عمل کند. حداکثر فرکانس ورودی: 50 KHZ درصد عملکرد: 30% – 70% |
|
نمودار سیم کشی ورودی / خروجی دیجیتال
حالت NPN/PNP و برق داخلی / خارجی به صورت U اتصال کوتاه کنید.حالت داخلی NPN است و به طور پیش فرض پذیرفته شده است.
موقعیت اتصال کوتاه نوع U
نکته: رابط صفحه کلید را میتوان برای اتصال یک صفحه کلید خارجی استفاده کرد، اما وقتی از صفحه داخلی VFD استفاده میشود نمیتوان از صفحه کلید خارجی استفاده کرد..
اگر سیگنال ورودی از ترانزیستور NPN بیاید، اتصال کوتاه از نوع U را بین +24 ولت و PW بر اساس توان مصرفی مطابق شکل زیر تنظیم کنید.
اگر سیگنال ورودی از از ترانزسیتور PNP میآید. اتصال کوتاه نوع U بر اساس توان تنظیم کنید.
نحوه کارکرد صفحه کلید اینورتر GD270 اینوت
VFD بهعنوان یک بخش استاندارد به صفحه کلید LED مجهز شده است. میتوانید از صفحه کلید برای کنترل شروع و توقف استفاده کنید، خواندن وضعیت دادهها و پارامترهای VFD تنظیم کنید. با استفاده از کیپد میتوانید خطاهای درایو را مشاهده کنید و یا خطاها را ریست کنید. این کار را به وسیله کیپد ردایوامکان پذیر است که میتوانید در زمان بروز خطا و تعمیر درایو اینوت انجام دهید.

صفحه کلید LED یک بخش استاندارد برای VFD است. علاوه بر این صفحه کلید LCD (یک قسمت انتخابی) میتواند در صورت نیاز استفاده شود. صفحه کلید LCD از چندین زبان پشتیبانی میکند، عملکرد کپی پارامتر، صفحه نمایش ده ردیفی با وضوح بالا. اندازه نصب LCD با صفحه کلید LED سازگار است.
اگر نیاز دارید صفحه کلید را به صورت خارجی نصب کنید (یعنی موقعیت دیگری به جای VFD)، میتوانید از پیچهای M3 برای محکم کردن صفحه کلید استفاده کنید یا شما میتوانید از بست نصب صفحه کلید برای نصب صفحه کلید استفاده کنید. براکت نصب یک قطعه اختیاری برای380 ولت 1.5 تا 30 کیلووات است. اما یک قطعه استاندارد برای 380V , 37-500 KW است.
| اسم | توضیحات | ||||
| 1 | نشاندهنده وضعیت | RUN/TUNE | نشان دهنده وضعیت در حال اجرا خاموش: VFD متوقف شده است. چشمک زدن: VFD پارامترها را تنظیم خودکار میکند. روشن: VFD در حال اجرا است. |
||
| FWD/REV | نشانگر اجرای به جلو یا برعکس LED خاموش: VFD به جلو در حال اجرا است. LED روشن: VFD برعکس کار می کند. |
||||
| LOCAL/REMOT | نشان میدهد که VFD با کدام یک از صفحه کلید،پایانهها یا ارتباط از راه دور کنترل می شود. خاموش: از طریق صفحهکلید کنترل میشود. چشمک زدن: VFD از طریق ترمینال کنترل میشود. روشن: VFD از طریق ارتباط از راه دور کنترل میشود. |
||||
| TRIP | نشاندهده خطا LED روشن: در حالت خطا LED خاموش: در حالت عادی LED چشمک زن: در حالت قبل از زنگ هشدار |
||||
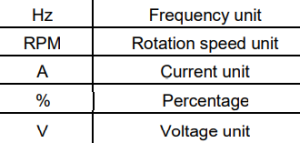
| 2 | نشاندهنده واحد | 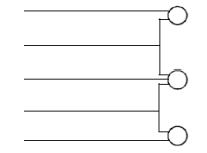 |
 |
||
| اسم | توضیحات | ||||
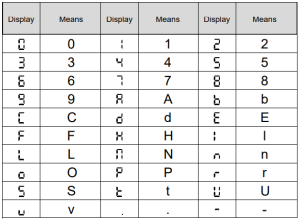
| 1 | منطق نمایش دیجیتال | LED پنج رقمی داده های نظارتی مختلف و کدهای هشدار مانند تنظیم فرکانس و فرکانس خروجی را نمایش می دهد.
|
|||
| 2 | پتانسیومتر دیجیتال | برای تنظیم فرکانس استفاده میشود. برای جزئیات، به توضیحات P08.41 مراجعه کنید. | |||
کلیدهای کیپد درایو GD270 اینوت
| برای ورود یا خروج از منوهای سطح 1 یا حذف یک پارامتر، آن را فشار دهید. | کلید برنامه نویسی |  |
کلیدها | 5 |
| برای ورود به منوها به صورت آبشاری،آن را فشار دهید حالت یا تنظیم یک پارامتر را تأیید کنید |
کلید تایید |  |
||
| برای افزایش داده یا حرکت به سمت بالا، آن را فشار دهید | کلید بالا |  |
||
| برای کاهش داده یا حرکت به سمت پایین، آن را فشار دهید. | کلید پایین |  |
||
| برای انتخاب پارامترهای نمایش به سمت راست در رابط برای VFD در حالت توقف یا در حال اجرا یا برای انتخاب ارقام برای تغییر در طول تنظیم پارامتر، آن را فشار دهید. | کلید جابجایی به راست |  |
| هنگام استفاده از صفحه کلید برای کنترل، آن را فشار دهید تا VFD اجرا شود. | کلید اجرا |  |
کلیدها | 5 |
| آن را فشار دهید تا VFD در حال اجرا متوقف شود. عملکرد این کلید توسط P07.04 محدود شده است. در حالت هشدار خطا، این کلید را می توان برای تنظیم مجدد در هر حالت کنترلی استفاده کرد. | متوقف کردن/ کلید ریست |
 |
||
| تابع توسط P07.02 تعیین می شود. | کلید میانبر چندمنظوره |  |
| پیشفرض | توضیحات | اسم پارامتر | پارامتر |
| 0:کنترل وکتور سرعت بدون سنسور (svc) مد 0 1: کنترل وکتور سرعت بدون سنسور (svc) مد 1 2:کنترل وکتور توجه: قبل از استفاده از کنترل ( 0یا 1)، ابتدا تنظیم خودکار پارامتر (autotuning) VFD را برای موتور فعال کنید. |
مد کنترل سرعت | P00.00 | |
| 0: کی پد (صفحه کلید) 1: ترمینال 2: ارتباط (شبکه) |
مرجع فرمان (کانال اجرا دستورات) |
P00.01 | |
| 0: مدباس 1:پروفیباس ، کن اپن ، دیوایس نت 2:اترنت 3:اترکت ، پروفینت 4:کارت های افزایشی قابل برنامه ریزی 5:کارت شبکه بی سیم توجه: گزینه های 1، 2، 3، 4 و 5 به صورت کارت های افزایشی هستند و تنها زمانی قابل استفاده اند که این کارت هاپیکربندی شده باشند |
حالت شبکه برای اجرای فرمان |
P00.02 | |
| برای تنظیم حداکثر فرکانس خروجی VFDاستفاده می شود. به کد توجه کنید زیرااساس تنظیم فرکانس و شتاب (ACC) وکاهش سرعت(DEC)میباشد. محدوده تنظیم: (P00.04, 10.00)–630.00Hzحداکثر |
حداکثر فرکانس خروجی | P00.03 | |
| حد بالای فرکانس در حال اجرا، بالا ترین فرکانس خروجی VFDاست. که کمتر یا مساوی با حداکثر فرکانس خروجی است. زمانی که فرکانس تنظیم شده بالاتر از فرکانس در حال اجرا باشد ، حد بالای فرکانس برای اجرای دستورات اعمال میشود. محدوده تنظیم: P00.05–P00.03 (حداکثر خروجی فرکانس) |
حد بالای فرکانس فرمان (اجرا) |
P00.04 | |
| حد پایین فرکانس در حال اجرا ، پایین ترین فرکانس خروجی VFD است . زمانی که فرکانس تنظیم شده پایین تر از فرکانس در حال اجرا باشد ، حد پایین فرکانس برای اجرای دستورات اعمال میشود. توجه: حداکثر فرکانس خروجی ≥ حد بالایی از فرکانس ≥ حد پایین فرکانس محدوده تنظیم: 0.00Hz–P00.04 (حد بالای فرکانس اجرا) |
حد پایین فرکانس فرمان (اجرا) |
P00.05 | |
| 0: کی پد (صفحه کلید) 1: ورودی آنالوگ 1 (1AI) 2: وروی آنالوگ 2 (AI2) 3: ورودی آنالوگ 3 (AI3) 4 : پالس با سرعت بالا HDIA : 5 برنامه ساده PLC : 6سرعت چند مرحله ای برای اجرا 7: کنترل حلقه بسته PID :8 ارتباط مدباس 9: شبکه پروفیباس ، شبکه کن اپن ، شبکه دیوایس نت 10: ارتباط اترنت 11: رزرو 12: رزرو 13: شبکه اترکت ، شبکه پروفینت 14: کارت های افزایشی قابل برنامه ریزی 15_17:رزرو 18: صفحه کلید برای ماژول های توان کوچک |
تنظیم کانال از دستور فرکانس A
(مرجع فرمان سرعت) |
P00.06 P00.07 |
|
| : 0 حداکثر فرکانس خروجی 1 : دستور فرکانس A |
مرجع فرمان فرکانس B |
P00.08 | |
| A : 0 B : 1 2 : (A+B) 3 : (A-B) 4 : حداکثر (A,B) 5 : حداقل (A,B) |
حالت ترکیب سورس فرکانس A وB |
P00.09 | |
| هنگامی که فرمان فرکانس A و B انتخاب میشود ، صفحه کلید روی تنظیمات اصلی است برای تنظیم پارامتر یکی از داده های فرکانس از VFD | تنظیم فرکانس از طریق صفحه کلید |
P00.10 | |
| زمان ACC به معنای زمان مورد VFD است تا در صورت نیاز از 0 هرتز به حداکثر سرعت برسد. فرکانس خروجی (P00.03) |
زمان ACC | P00.11 | |
| زمان DEC به معنای زمان مورد VFD است تا در صورت نیاز از حداکثر سرعت پایین می آید. فرکانس خروجی(P00.03) تا 0 هرتز. VFD دارای چهار گروه زمان ACC/DEC است، که توسط P05 قابل انتخاب است. زمان پیشفرض کارخانه ACC/DEC VFD اولین گروه زمان است P00.11و P00.12 محدوده تنظیم: 0.0–3600.0 ثانیه |
زمان DEC | P00.12 | |
| 0: حرکت در جهت پیش فرض :1حرکت در جهت مخالف 2: غیر فعال کردن حرکت در جهت مخالف |
جهت حرکت | P00.13 | |
| مزیت فرکانس کریر بالا: شکل موج جریان ایده آل، موج هارمونیک جریان کم و نویز موتور. جریان کم موج های هارمونیک و نویز موتور. معایب فرکانس کریر بالا: افزایش تلفات سوئیچ افزایش دما VFDو تاثیر آن بر ظرفیت خروجی. VFD نیاز دارد در فرکانس حامل بالا کاهش یابد در همان زمان، نشت و تداخل مغناطیسی الکتریکی افزایش خواهد یافت. برعکس، فرکانس بسیار کم کریر ممکن است باعث عملکرد ناپایدار در فرکانس پایین شود، گشتاور کاهش پیدا میکند و یا حتی منجر به نوسان میشود. فرکانس کریر به درستی در کارخانه قبل از تحویل VFD تنظیم شده است. به طور کلی، شما نیازی به تغییر آن ندارید. زمانی که فرکانس استفاده شده از فرکانس کریر پیش فرض بیشتر شود. VFD برای هر افزایش 1k فرکانس حامل باید 10 درصد کاهش یابد. محدوده تنظیم: 1.2-15.0kHz |
فرکانس کریر | P00.14 | |
| 0: بدون عملکرد 1:روتاری اتوتیون (تنظیمات خودکارچرخشی) اتوتیون پارامتر های جامع موتور توصیه می شود. زمانی که دقت کنترل بالا مورد نیاز است از روتاری اتوتیون استفاده کنید (حتما بار را از روی شفت جدا کنید) 2:استاتیک اتوتیون 1 (اتوتیون جامع) : اتوتیون استاتیک 1 در مواردی استفاده می شود که نمی توان موتور را از بار جدا کرد. 3:استاتیک اتوتیون 2 (اتوتیون جامع) : وقتی موتور فعلی 1 است، فقط در حالت P02.06،P02.07 و P02.08 اتوتیون می شوند. هنگامی که موتور فعلی 2 است، فقط در حالت P12.06، P12.07 و P12.08 اتوتیون می شوند. 4: روتاری اتوتیون 2، که شبیه به روتاری اتوتیون 1 است اما فقط برای AM (موتور های آسنکرون ها) معتبر است. 5:استاتیک اتوتیون 3 (تنظیم خودکار جزئی)،که فقط برای AM (موتور های آسنکرون) معتبر است. |
پارامتر های اتوتیون(تنظیم خودکار) موتور |
P00.15 | |
| 0: غیر فعال 1: در تمام مراحل معتبر است عملکرد تنظیم خودکار VFD می تواند اثرات نوسانات باس DCولتاژرا بر روی ولتاژ خروجی VFD به علت از بین ببرد. |
عملکرد AVR | P00.16 | |
| Reserved | P00.17 | ||
| 0: بدون عملکرد 1: بازیابی مقادیر پیش فرض 2: پاک کردن سوابق خطا 3_6: Reserved توجه : پس از انجام عملیات انتخاب شده، کد عملکرد به طور خودکار به 0 بازیابی می شود. بازگرداندن مقادیر پیش فرض ممکن است رمز عبور کاربر را حذف کند. هنگام استفاده از این عملکرد احتیاط کنید. |
بازگردان پارارمتر ( ریست فکتوری) |
P00.18 | |
گروه P01 – کنترل start و stop
| 0: دایرکت استارت 1:استارت بعد از ترمز DC 2: راه اندازی مجدد با دنبال کردن سرعت قبل توجه: در SVC 0، ردیابی سرعت قابل انتخاب نیست، که نشان می دهد P01.00 می تواند 0 یا 1 باشد. |
حالت start | P01.00 |
| این پارامتر فرکانس اولیه را در هنگام شروع VFD نشان می دهد. برای اطلاعات دقیق به P01.02 (زمان نگهداری فرکانس شروع) مراجعه کنید. محدوده تنظیم: 0.00-50.00 هرتز |
فرکانس شروع دایرکت استارت | P01.01 |
| تنظیم فرکانس راه اندازی مناسب می تواند گشتاور را در هنگام استارت VFD افزایش دهد. فرکانس شروع HOLD TIME خروجی VFD فرکانس شروع است و سپس VFD از فرکانس شروع به فرکانس تنظیم شده اجرا می شود. |
فرکانس شروع هولد تایم (hold time) |
P01.02 |
| اگر فرکانس تنظیم شده کمتر از فرکانس شروع باشد، VFD کار را متوقف می کند و در حالت آماده به کار باقی می ماند. فرکانس شروع در فرکانس حد پایین محدود نمی شود. محدوده تنظیم: 0.0-50.0 ثانیه |
||
| VFD قبل از شروع، ترمز DC را با جریان ترمز اجرا میکند. و بعد از زمان ترمز DC سرعت آن افزایش می یابد. اگر زمان تنظیم شده ترمز) DC ( 0 باشد، ترمز DC نامعتبر است. جریان ترمز قوی تر نشان دهنده قدرت ترمز بیشتر است. جریان ترمز DC قبل از شروع، درصدی از جریان نامی VFD است. P01.03 محدوده تنظیم: 0.0-100.0٪ P01.04 محدوده تنظیم: 0.00-50.00 ثانیه |
جریان ترمز قبل از استارت
زمان ترمز قبل از شروع |
P01.03
P01.04 |
| برای نشان دادن تغییر حالت فرکانس در هنگام شروع و اجرا استفاده می شود. 0: نوع خطی. فرکانس خروجی به صورت خطی افزایش یا کاهش می یابد.1: منحنی S. فرکانس خروجی طبق منحنی S افزایش یا کاهش می یابد. منحنی S عموماً برای آسانسورها، نوار نقاله ها و سایر سناریوهای کاربردی که در آن ها به شروع نرم تری نیاز است، اعمال می شود.توجه: اگر حالت 1 انتخاب شده است، P01.06، P01.07 را تنظیم کنید . P01.27 و P01.28 بر این اساس. |
حالت ACC/DEC | P01.05 |
| انحنای منحنی S توسط محدوده ACC و ACC/DECtime تعیین می شود. | زمان شروع بخش منحنی S ACCزمان پایان بخش منحنی S ACC |
P01.06
P01.07 |
| 0: کاهش سرعت برای توقف. پس از دستور توقف فرمان استوپ اعمال می شود. VFD فرکانس خروجی را بر اساس حالت DEC و زمان DEC تعریف شده کاهش می دهد. بعد از افت فرکانس به سرعت توقف VFD متوقف می شود. P01.15)) |
مد STOP | P01.08 |
| 0: کاهش سرعت برای توقف. پس از دستور توقف فرمان استوپ اعمال می شود. VFD فرکانس خروجی را بر اساس حالت DEC و زمان DEC تعریف شده کاهش می دهد. بعد از افت فرکانس به سرعت توقف VFD متوقف می شود. P01.15))1:حالت استوپ سریع. پس از اعمال یک دستور توقف، VFD بلافاصله خروجی را متوقف می کند. وسرازیری بار بر اساس اینرسی مکانیکی متوقف شود.فرکانس شروع ترمز DC برای توقف: در طول کاهش سرعت برای توقف، VFD ترمز DC را برای توقف شروع می کند. وقتی فرکانس running می رسد فرکانس شروع توسط P01.09 تعیین می شودزمان انتظار قبل از ترمز DC: VFD خروجی را قبل از شروع ترمز DC مسدود می کند. بعد از این زمان انتظارترمز DC برای جلوگیری از جریان بیش از حد ناشی از ترمز DC در سرعت بالا شروع می شود. جریان ترمز DC برای توقف: این انرژی ترمز DC اعمال شده را نشان می دهد. جریان قوی تر نشان دهنده اثر ترمز DC بیشتر است. زمان ترمز DC برای توقف: این نشان دهنده زمان نگه داشتن ترمز DC است. اگر زمان 0 باشد، ترمز DC نامعتبر است و VFD سرعت خود را کاهش می دهد تا در زمان مشخص شده متوقف شود. |
فرکانس شروع ترمز DC برای توقف
زمان مغناطیس زدایی جریان ترمز DC برای توقف زمان ترمز DC برای توقف |
P01.09
P01.10 P01.11 P01.12 |
| این پارامتر زمان انتقال مشخص شده در P01.14 را در هنگام تعویض چرخش FWD/REV نشان می دهد. شکل زیر را ببینید: | زمان deadzone حرکت FWD/REV | P01.13 |
| 0: سوئیچ در فرکانس صفر 1: در فرکانس شروع سوئیچ کنید. 2: بعد از اینکه سرعت به مقدار نهایی رسید فرمان استوپ با تاخیر صادر شود. |
حالت سوئیچینگ حرکت FWD/REV |
P01.14 |
| 0.00–100.00Hz | توقف سرعت | P01.15 |
| 0:دیتکت با سرعت تنظیم شده (مخصوص برای ولتاژspace vector در حالت کنترل) 1: دیتکت از طریق سرعت فیدبک |
حالت دیتکت سرعت توقف | P01.16 |
| 0.00–100.00s | توقف زمان دیتکت سرعت |
P01.17 |
| زمانی که کانال مرجع فرمان ترمینال های کنترل باشد سیستم وضعیت ترمینال در حال اجرا را در حین روشن شدن تشخیص (دیتکت میکند) می دهد. 0: دستور اجرای ترمینال در حالت روشن نامعتبر است. حتی فرمان ران در هنگام روشن شدن، معتبر در نظر گرفته می شود.Vfd ران نمی شود و تا زمانی که دستور رانینگ کامند لغو نشود و دوباره فعال شود، وضعیت حفاظت را حفظ می کند. 1: فرمان اجرای ترمینال هنگام روشن شدن معتبر است. اگر فرمان در حال اجرا(رانینگ کامند) در هنگام روشن شدن، معتبر در نظر گرفته شود، VFD به طور خودکار پس از مقداردهی اولیه فعال می شود. توجه: قبل از استفاده از این عملکرد احتیاط کنید. در غیر این صورت ممکن است نتیجه جدی به دنبال داشته باشد. |
ترمینال فرمان حفاظت زمان روشن شدن | P01.18 |
| این پارامتر وضعیت ران شدن VFD را زمانی که فرکانس تنظیم شده کمتر از حد پایین تر است، تعیین می کند. 0: حرکت با فرکانس حد پایین 1:توقف 2:حالت اسلیپ هنگامی که فرکانس تنظیم شده کمتر از حد پایین باشد، VFD متوقف می شود. اگر فرکانس تنظیم شده دوباره از حد پایین یک تجاوز کند و مدت زمان تعیین شده توسط P01.20 باشد VFD به طور خودکار حالت ران را از سر می گیرد. |
انتخاب عملکرد درایو در حد پایین فرکانس (این عملکرد برای فرکانس بالای 0 معتبر است) |
P01.19 |
| برای تنظیم زمان خارج شدن از حالت sleep delay هنگامی که فرکانس رانینگ VFD کمتر از حد پایین باشد، VFD به حالت استندبای (حالت آماده به کار) می شود. هنگامی که فرکانس تنظیم شده دوباره از حد پایین فراتر میرود طبق زمان تعیین شده در پارامتر P01.20,طول میکشد. درایو اتوماتیک ران میشود. |
خارج شدن از حالت sleep delay |
P01.20 |
| نشان می دهد که آیا VFD پس از روشن شدن مجدد به طور خودکار اجرا می شود یا خیر. 0: غیرفعال 1:فعال.اگر شرط راه اندازی مجدد(ریستارت) فعال شود، VFD پس از انتظار برای زمان تعیین شده توسط P01.22 به طور خودکار اجرا می شود. |
حالت راه اندازی درایو بعد از قطع و وصل برق | P01.21 |
| این پارارمتر نشان دهنده زمان انتظار قبل از اجرای خودکار VFD است که دوباره روشن می شوداین پارامتر نشان دهنده زمان انتظار قبل از اجرای خودکار VFD است که دوباره روشن می شود. | زمان انتظار برای ریستارت (راه اندازی مجدد) بعد از خاموش شدن | P01.22 |
| پس از اینکه دستور اجرای VFD داده شد)رانینگ کامند)، VFD در حالت استندبای (آماده به کار) است و با تأخیر تعریف شده توسط P01.23 برای اجرای رهایی ترمز مجدداً راه اندازی می شود. محدوده تنظیم: 0.0-600.0 ثانیه |
تاخیر در استارت Start delay |
P01.23 |
| 0.0–600.0s | متوقف کردن سرعت با تاخیر زمانی | P01.24 |
| 0: خروجی بدون ولتاژ 1:خروجی با ولتاژ 2: خروجی با جریان ترمز DC برای توقف |
وضعیت خروجی درایو در فرکانس 0 هرتز در مد Open-loop |
P01.25 |
| 0.0–60.0s | زمان DEC برای توقف اضطراری | P01.26 |
| 0.0–50.0s | زمان شروع بخش منحنی DEC S | P01.27 |
| 0.0–50.0s | زمان پایان بخش منحنی DEC S | P01.28 |
| هنگامی که VFD در حالت شروع مستقیم استارت میشود (P01.00=0) برای وارد کردن ترمز اتصال کوتاه، P01.30 را روی یک مقدار غیر صفر تنظیم کنید. در هنگام توقف، اگر فرکانس در حال اجرا VFD کمتر از فرکانس شروع ترمز برای توقف (P01.09) P01.31 را روی یک مقدار غیر صفر تنظیم کنید تا ترمز اتصال کوتاه را برای توقف وارد کنید و سپس ترمز DC را در زمان تعیین شده توسط P01.12 تنظیم کنید. (به توضیحات P01.09–P01.12 مراجعه کنید) P01.29 setting range: 0.0–150.0% (VFD) P01.30 setting range: 0.0–50.00s P01.31 setting range: 0.0–50.00s |
جریان ترمز اتصال کوتاه
زمان ترمز اتصال کوتاه برای شروع زمان ترمز اتصال کوتاه برای توقف |
P01.29
P01.30 P01.31 |
| 0–10.000s | زمان تاخیر jogging | P01.32 |
| 0–P00.03 | فرکانس شروع برای توقف ترمزدرجاگینگ | P01.33 |
| 0–3600.0s | Sleep delay | P01.34 |
| روش های Speed tracking 0: از فرکانس توقف 1: از فرکانس پایین 2: از حداکثر فرکانس (P00.03) |
روش های Speed tracking |
P01.35 |
| 1–100 | انتخابات سریع/آهسته برای speed tracking |
P01.36 |
| 30%–200% (motor) | جریان Speed tracking |
P01.37 |
| 0.0–10.0s | مغناطیس زدایی زمان Speed tracking |
P01.38 |
| مکان های LED: حالت دادن فعلی به vector control 0: 120٪ جریان در هنگام راه اندازی داده می شود که بر اساس P01.35 مقدار داده شده تغییر می کند. 1: جریان بر اساس P01.35 داده شده است مکان های LED: انتخاب حالت PWM 0: حالت مدولاسیون 2PH 1: بر اساس P08.40 مکان صدها LED: جهت جستجو برای speed tracking 0: هر دو حالتforward و reverse قابل جست وجو باشند. 1: حالت reverse قابل جست و جو نیست. |
کنترل پیشرفته برای speed tracking |
P01.39 |
| 0–3000 | مقررات ضریب KP برای speed tracking |
P01.40 |
| 0–3000 | مقررات ضریب KI برای speed tracking |
P01.41 |
گروه P02 – پارامترهای موتور1
| 0: موتور آسنکرون (AM) 1: موتور سنکرون (SM) |
نوع موتور 1 | P02.00 | |
| 0.1–3000.0kW | توان نامی AM 1 | P02.01 | |
| 0.01Hz–P00.03 (حداکثر فرکانس خروجی) | فرکانس نامی AM 1 | P02.02 | |
| 1–60000rpm | سرعت نامی AM 1 | P02.03 | |
| 0–1200V | ولتاژ نامی 1 AM | P02.04 | |
| 0.8–6000.0A | جریان نامی AM 1 | P02.05 | |
| 0.001–65.535Ω | مقاومت استاتور 1AM | P02.06 | |
| 0.001–65.535Ω | مقاومت روتور AM 1 |
P02.07 | |
| 0.1–6553.5Mh | اندوکتانس نشتی AM 1 |
P02.08 | |
| 0.1–6553.5Mh | اندوکتانس متقابل AM 1 | P02.09 | |
| 0.1–6553.5A | جریان بدون بار AM 1 |
P02.10 | |
| 0.0–100.0% | ضریب اشباع مغناطیسی 1 هسته آهنی AM 1 | P02.11 | |
| 0.0–100.0% | ضریب اشباع مغناطیسی 2 هسته آهنی AM 1 | P02.12 | |
| 0.0–100.0% | اشباع مغناطیسی ضریب 3 هسته آهنی AM 1 |
P02.13 | |
| 0.0–100.0% | ضریب اشباع مغناطیسی 4 هسته آهنی AM 1 | P02.14 | |
| 0.1–3000.0kW | توان نامی SM 1 | P02.15 | |
| 0.01Hz–P00.03 (حداکثر فرکانس خروجی) | فرکانس نامی SM 1 | P02.16 | |
| 1–128 | تعداد جفت قطب SM 1 |
P02.17 | |
| 0–1200V | ولتاژ نامی SM 1 | P02.18 | |
| 0.8–6000.0A | جریان نامی SM 1 | P02.19 | |
| 0.001–65.535Ω | مقاومت استاتورSM 1 | P02.20 | |
| 0.01–655.35Mh | اندوکتانس محور مستقیم SM 1 |
P02.21 | |
| 0.01–655.35Mh | اندوکتانس محور چهارگانه SM 1 | P02.22 | |
| 0–10000 | شمارنده emf از SM 1 |
P02.23 | |
| Reserved | P02.24 | ||
| Reserved | P02.25 | ||
| 0:بدون محافظت 1: حفاظت موتور مشترک (با جبران سرعت).از آنجایی که اثر خنک کنندگی یک موتور معمولی در سرعت پایین کاهش می یابد مقدار حفاظت حرارتی الکترونیکی مربوطه باید به درستی تنظیم شود، جبران کم نشان دهنده کاهش آستانه حفاظت از اضافه بار موتوری است که فرکانس کاری آن کمتر از 30 هرتز است. 2: حفاظت موتور با فرکانس متغیر (بدون جبران سرعت کم). زیرا عملکرد اتلاف گرما برای موتور با فرکانس قابل دسترس تحت تأثیر سرعت چرخش قرار نمی گیرد. لازم نیست مقدار حفاظت را در سرعت پایین تنظیم کنید. |
حفاظت از اضافه بار موتور 1 | P02.26 | |
| ضریب اضافه بار موتور M=Iout/(In*K) در جریان نامی موتور، جریان خروجی VFD است، K ضریب حفاظت از اضافه بار موتور است. مقدار کوچکتر “K” نشان دهنده مقدار بزرگتر است”M” هنگامی که M=116٪، پس از اضافه بار موتور به مدت 1 ساعت، حفاظت انجام می شود. هنگامی که M = 200٪، حفاظت پس از اضافه بار موتور به مدت 60 ثانیه انجام می شود. و هنگامی که M≥400٪، محافظت بلافاصله انجام می شود. |
ضریب حفاظت اضافه بار موتور 1 | P02.27 | |
| این پارامتر را می توان برای تنظیم مقدار نمایش قدرت موتور 1 استفاده کرد. با این حال، بر عملکرد کنترل VFD تأثیر نمی گذارد. محدوده تنظیم: 0.00-3.00 |
ضریب کالیبراسیون نمایشگر قدرت موتور 1 | P02.28 | |
| 0: نمایش بر اساس نوع موتور.در این حالت فقط پارامترهای مربوط به نوع موتور فعلی نمایش داده می شود. 1: نمایش همه. در این حالت تمام پارامترهای موتور نمایش داده می شود. |
نمایش پارامتر موتور 1 | P02.29 | |
| 0–30.000kgm2 | اینرسی سیستم موتور 1 | P02.30 | |
| 0–65535 | Reserved | P02.31– P02.32 |
گروه P05 ترمینال های ورودی
| یک مکان: ورودی نوع HDI 0: HDIA ورودی پالس با سرعت بالا است. 1: HDIA ورودی دیجیتال است |
ورودی نوع HDI | P05.00 | |
| 0: بدون عملکرد | عملکرد s1 | P05.01 | |
| 1: راستگرد | عملکرد 2s | P05.02 | |
| 2: چپگرد | عملکرد 3s | P05.03 | |
| 3: کنترل رانینگ سه سیمه 4: جاگ راستگرد 5:جاگ چپگرد 6: حرکت به سمت توقف 7: پاک کردن خطاها 8: متوقف کردن رانینگ |
عملکرد S4. توجه: نمی توانید هر دو خروجی S4 و Y1 را همزمان انتخاب کنید. | P05.04 | |
| 9: ورودی خطاهای خارجی 10: افزایش تنظیم فرکانس (UP) 11: کاهش تنظیم فرکانس (DOWN) 12: پاک کردن تنظیمات افزایش و کاهش فرکانس 13: سوئیچ بین تنظیمات A و تنظیم B 14: سوئیچ بین تنظیمات ترکیبی و تنظیم A 15: سوئیچ بین تنظیمات ترکیبی و تنظیم B 16: ترمینال سرعت چند مرحله ای 1 17: ترمینال سرعت چند مرحله ای 2 18: ترمینال سرعت چند مرحله ای 3 19: ترمینال سرعت چند مرحله ای 4 20: توقف چند مرحله ای سرعت حرکت 21: انتخاب زمان ACC/DEC 1 22: انتخاب زمان ACC/DEC 2 23: ریست کردن استاپ ساده plc 24: توقف ساده PLC 25: توقف PID کنترلر 26: توقف لرزش های فرکانس 27: ریست کردن کردن ارزش های فرکانس 28: ریست شمارنده 29:سوئیچ بین کنترل سرعت و کنترل گشتاور
30: غیرفعال کردن ACC/DEC
31: فعال کردن شمارنده
32: Reserved
33: پاک کردن موقت تنظیمات افزایش/کاهش فرکانس
34: ترمز DC
35: سوئیچ از موتور1 به موتور 2
36: تغییر کانال مرجع فرمان رانینگ کامند به صفحه کلید
37: تغییر کانال مرجع فرمان رانینگ کامند به ترمینال
38: تغییر کانال مرجع فرمان رانینگ کامند به ارتباط شبکه
39: دستور تاخیر
40: پاک کردن مصرف برق
41: نگه داشتن مصرف برق
42: تغییرتنظیمات منبع تغذیه را حداکثر گشتاور ترمز به صفحه کلید
43–72: Reserved |
عملکرد HDIA | P05.05 | |
| Reserved | P05.06 | ||
| برای تنظیم قطبیت ترمینال های ورودی استفاده می شود. وقتی یک بیت 0 باشد، ترمینال ورودی با مثبت فعال میشود. وقتی یک بیت 1 باشد، ترمینال ورودی با منفی فعال میشود. |
نوع ترمینال ورودی | P05.08 | |
| برای تعیین زمان فیلتر S1-S4 و نمونه برداری ترمینال HDIA استفاده می شود.در مواردی که ارتباط قوی است ، مقادیر افزایش داده میشود تا از سوء عملکرد جلوگیری شود. | زمان فیلتر ورودی دیجیتال | P05.09 | |
| BIT0: S1 virtual terminal BIT1: S2 virtual terminal BIT2: S3 virtual terminal BIT3: S4 virtual terminal BIT4: HDIA virtual terminal BIT5: Reserved |
تنظیمات ترمینال مجازی | P05.10 | |
| برای تنظیم حالت کنترل ترمینال استفاده می شود. 0: کنترل دو سیم 1 توانمندی سازگار با جهت این حالت به طور گسترده استفاده می شود. دستور ترمینال تعریف شده FWD/REV جهت چرخش موتور را تعیین می کند. |
حالت کنترل ترمینال | P05.11 | |
| 1: کنترل دوسیمه 2 ، امکان خارج شدن از جهت حرکت در این حالت، FWD ترمینال فعال کننده است.جهت حرکت بستگی به وضعیت REV دارد. |
|||
| 2:کنترل سه سیمه 1 . این حالت Sin را به عنوان ترمینال فعال تعریف می کند، و فرمان رانینگ توسط FWD تولید می شود، در حالی که جهت توسط REV کنترل می شود. در حین اجرا، ترمینال Sin باید بسته شود،و ترمینال FWD یک سیگنال لبه بالارونده تولید می کند. سپس VFD شروع به کار در جهت تعیین شده توسط حالت ترمینال REV می کند. VFD باید با قطع اتصال ترمینال Sin متوقف شود.توجه: برای حالت اجرا با کنترل دو سیم، زمانی که ترمینال FWD/REV فعال است. اگر VFD به دلیل دستور توقف داده شده توسط منبع دیگر متوقف شود. VFD بعد از برداشته شدن دستور stop دوباره اجرا نمی شود حتی اگر ترمینال کنترل FWD/REV هنوز فعال باشد. برای اجرای VFD، باید دوباره FWD/REV را فعال کنید، برای مثال،توقف تک چرخه PLC، توقف با طول ثابت و توقف معتبر STOP/RST در حین کنترل ترمینال. (به P07.04 مراجعه کنید.)توجه : برای حالت رانینگ مد دو سیم، زمانی که ترمینال FWD/REV فعال است. اگر VFD به دلیل دستور توقف داده شده توسط منبع دیگری متوقف شود، VFD بعد از قطع شدن دستور توقف دوباره ران نمی شود حتی اگر ترمینال کنترل FWD/REV همچنان فعال باشد. برای ران کردن VFD، باید دوباره FWD/REV را فعال کنید. به عنوان مثال، توقف تک چرخه PLC، توقف با طول ثابت، و توقف معتبر STOP/RST در حین کنترل ترمینال. (دیدن P07.04.) |
|||
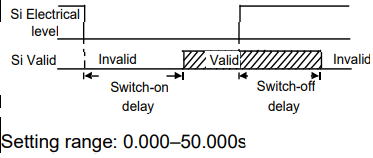
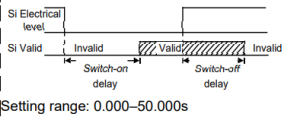
| برای تعیین زمان تاخیر مربوط به تغییرات سطح الکتریکی در هنگام روشن شدن یا روشن شدن پایانه های ورودی قابل برنامه ریزی استفاده می شود. | سوئیچ on delay_s1 | P05.12 | |
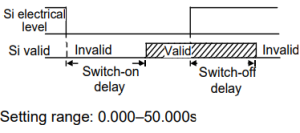 |
سوئیچoff delay_s1 | P05.13 | |
| پس از فعال شدن ترمینال مجازی، وضعیت ترمینال فقط در حالت ارتباط قابل تغییر است. | سوئیچ on delay_s2 | P05.14 | |
| سوئیچoff delay_s2 | P05.15 | ||
| سوئیچ on delay_s3 | P05.16 | ||
| سوئیچoff delay_s3 | P05.17 | ||
| سوئیچ on delay_s4 | P05.18 | ||
| سوئیچoff delay_s4 | P05.19 | ||
| سوئیچ on delay_HDIA | P05.20 | ||
| سوئیچ off delay_HDIA |
P05.21 |
گروه P06 – ترمینال های خروجی
| Reserved | Reserved | P06.00 | |
| 0: غیر فعال 1: رانینگ (در حال اجرا) 2:راستگرد 3:چپگرد 4: جاگینگ 5:خطای VFD 6: تشخیص سطح فرکانس FDT1 7: تشخیص سطح فرکانس FDT2 8: فرکانس نهایی 9: رانینگ با سرعت صفر 10: فرکانس حد بالایی 11: فرکانس حد پایین 12: آماده برای رانینگ 13: قبل از تاخیر 14: پیش هشدار اضافه بار 15: پیش هشدار زیر بار 16: مرحله PLC کامل شد 17: چرخه PLC کامل شد 18: تنظیم مقدار شمارش 19: مقدار شمارش شده به مدارتعیین شده رسیده 20: خطای خارجی به وجود آمده است 21: Reserved 22: زمان رانینگ رسیده 23: خروجی ترمینال مجازی ارتباطی MODBUS 24: خروجی ترمینال مجازی ارتباط PROFIBUS/CANopen/DeviceNet 25: خروجی ترمینال مجازی ارتباط اترنت 26: ولتاژ باس DC برقرار شد 27-32: Reserved 33: در محدودیت سرعت 34: خروجی ترمینال مجازی ارتباطی EtherCAT/PROFINET 35-36: Reserved 37: به هر فرکانس رسیده است 38-47: Reserved 48:حالت فایر مد فعال شد 49: پیش هشدارفیدبکPID1 بسیار کم است 50: پیش هشدارفیدبکPID1 بسیار زیاد است 51: PID1 در حالت اسلیپ 52: PID2 در راه اندازی 53: توقف PID2 54: نمایش ران با فشار پشتیبان 55: نشانگر کمبود آب ورودی 56: پیش آلارم خروجی 57: کنترل فرکانس متغیر موتور سیرکولیشن A 58: کنترل فرکانس متغیر موتور سیرکولیشن B 59: کنترل فرکانس متغیر موتور سیرکولیشن C 60: کنترل فرکانس متغیر موتور سیرکولیشن D |
خروجی y1 | P06.01 | |
| Reserved | P06.02 | ||
| خروجی RO1 | P06.03 | ||
| Reserved | P06.04 | ||
| برای تنظیم قطبیت پایانه های خروجی استفاده می شود. وقتی بیت 0 باشد، ترمینال ورودی با مثبت فعال میشود. 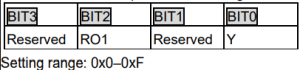 وقتی یک بیت 1 باشد، ترمینال ورودی با منفی فعال میشود . |
انتخاب نوع ترمینال خروجی | P06.05 | |
| برای تعیین زمان تاخیر مربوط به تغییرات سطح الکتریکی هنگام روشن یا خاموش شدن پایانه های خروجی قابل برنامه ریزی استفاده می شود. | سوئیچ on delay–Y1 | P06.06 | |
| سوئیچ off delay–Y1 | P06.07 | ||
| توجه: P06.08 و P06.09 فقط زمانی معتبر هستند که P06.00=1 باشد. | Reserved | P06.08 | |
| Reserved | P06.09 | ||
| سوئیچ on delay–RO1 | P06.10 | ||
| سوئیچ off delay–RO1 | P06.11 |
گروه P09 – کنترل PID
| هنگامی که انتخاب فرمان فرکانس (P00.06) یاP00. 07) ) برابر با 7 است، یا کانال تنظیم ولتاژ(P04.27) برابر با 6 است، حالت اجرای درایو در حالت PID است. این پارامتر کانال مورد نظر را در طول فرآیند PID تعیین می کند. 0: : صفحه کلید (P09.01) 1: ورودی آنالوگ 1 AI1)) 2: ورودی آنالوگ (AI2) 2 3: ورودی آنالوگ (AI3) 3 4: پالس سرعت بالا HDIA 5: رانینگ چند مرحله ای 6: ارتباط Modbus 7: ارتباط PROFIBUS/CANopen/DeviceNet 8: ارتباط Ethernet 9: Reserved 10: ارتباط EtherCAT/PROFINET 11: کارت افزایشی برنامه پذیر(قابل برنامه ریزی) 12: Reserved هدف تعیین شده PID فرآیند یک مقدار نسبی است که 100% آن معادل 100% سیگنال بازخورد سیستم کنترل شده است. سیستم همیشه با استفاده از یک مقدار نسبی (0-100.0٪) محاسبه را انجام می دهد. |
منبع مرجع PID | P09.00 |
| پارامتر زمانی که P09.00=0 است. محدوده تنظیم: -100.0%–100.0% |
ست پوینت PID از طریق کی پد | P09.01 |
| برای انتخاب کانال فیدبک PID استفاده میشود. 0: ورودی آنالوگ 1 (AI1) 1: ورودی آنالوگ 2 (AI2) 2: ورودی آنالوگ 3 (AI3) 3: پالس سرعت بالا HDIA 4: ارتباط Modbus 5: ارتباط PROFIBUS/CANopen/DeviceNet 6: ارتباط Ethernet 7: Reserved 8:ارتباط EtherCAT/PROFINET 9: کارت افزایشی برنامه پذیر(قابل برنامه ریزی) 10: Reserved توجه: کانال ست پوینت و کانال فیدبک نمی توانند تکراری باشند. در غیر این صورت نمی توان به کنترل موثر PID دست یافت. |
مرجع فیدبک PID | P09.02 |
| 0: خروجی PID مثبت است. هنگامی که سیگنال فیدبک بزرگتر از مقدار مرجع PID باشد، فرکانس خروجی VFD برای متعادل کردن PID کاهش می یابد. مثال: کنترل PID روی کوره 1: خروجی PID منفی است. هنگامی که سیگنال فیدبک بزرگتر از مقدار مرجع PID باشد. فرکانس خروجی VFD برای متعادل کردن PID افزایش می یابد. . مثال: کنترل PID روی کولینگ تاور |
انتخاب ویژگی های خروجی PID | P09.03 |
| این پارامتر برای ضریب GAIN متناسب P به ورودی PID اعمال می شود. P قدرت کل تنظیم کننده PID را تعیین می کند. مقدار 100 نشان می دهد که وقتی تفاوت بین مقدار فیدبک PID و مقدار داده شده 100٪ باشد، محدوده ای که در آن تنظیم کننده PID می تواند فرمان فرکانس خروجی را تنظیم کند حداکثر است. فرکانس (بی اثری تابع انتگرال و تابع دیفرانسیل) محدوده تنظیم: 0.00-100.00 |
ضریب GAINمتناسب (Kp) | P09.04 |
| برای تعیین سرعت انتگرال استفاده می شود تنظیم در انحراف فیدبک PID و مرجع از تنظیم کننده PID هنگامی که انحراف بازخورد و مرجع PID 100٪ است، تنظیم کننده انتگرال به طور مداوم در طول زمان کار می کند. (در نظر نگرفتن تابع تناسبی و تفاضلی) بدست آوردن حداکثر فرکانس خروجی (P00.03) یا حداکثر. ولتاژ (P04.31). زمان انتگرال کوتاه تر نشان دهنده تنظیم قوی تر است. محدوده تنظیم: 0.00-10.00 ثانیه |
زمان انتگرال (Ti) | P09.05 |
| ضریب مشتق گیر برای تعیین قدرت تنظیم نسبت تغییر در انحراف فیدبک PID و مرجع از تنظیم کننده PID استفاده می شود. اگر بازخورد PID در طول زمان 100٪ تغییر کند، تنظیم دیفرانسیل (بدون توجه به تابع تناسبی و انتگرال) حداکثر است. فرکانس خروجی (P00.03) یا حداکثر ولتاژ (P04.31).زمان دیفرانسیل طولانی تر نشان دهنده تنظیم قوی تر است.محدوده تنظیم: 0.00-10.00 ثانیه | زمان دیفرانسیل (Td) | P09.06 |
| برای نشان دادن زمان نمونه گیری فیدبک استفاده می شود. زمان نمونه برداری طولانی تر نشان دهنده پاسخ کندتر است. محدوده تنظیم: 0.001-10.000 ثانیه |
زمان نمونه برداری (T) | P09.07 |
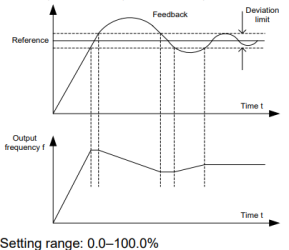
| خروجی سیستم PID حداکثر است. انحراف مرجع حلقه بسته همانطور که در شکل زیر نشان داده شده است، تنظیم کننده PID در ناحیه محدوده انحراف، تنظیم را متوقف می کند. پارامتر را به درستی تنظیم کنید تا دقت و پایداری سیستم PID را تنظیم کنید.
|
بازه حد کنترل PID | P09.08 |
| پارامتر ها برای تنظیم حد بالا و پایین مقادیر خروجی تنظیم کننده PID استفاده می شود.100.0% با حداکثر مطابقت دارد. فرکانس خروجی (P00.03) یا حداکثر. ولتاژ (P04.31). محدوده تنظیم P09.09: P09.10–100.0٪ محدوده تنظیم P09.10: -100.0٪–P09.09 |
بازه حد بالایی خروجی PID | P09.09 |
| برای تنظیم مقدار تشخیص آفلاین فیدبک PID استفاده می شود. وقتی مقدار فیدبک کوچکتر یا مساوی با مقدار تشخیص آفلاین فیدبک باشد، و مدت زمان از مقدار مشخص شده توسط P09.12 بیشتر می شود، VFD “عیب آفلاین بازخورد PID” را گزارش می دهد و صفحه کلید PIDE را نمایش می دهد. | حد پایین خروجی PID | P09.10 |
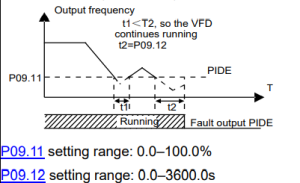 |
فیدبک زمان تشخیص آفلاین | P09.12 |
| مکان تک: 0: کنترل پیوسته با انتگرال گیر پس از رسیدن فرکانس به حد بالا/پایین 1: پس از رسیدن فرکانس به حد بالا/پایین، کنترل انتگرال را متوقف کنید. چند مکانه: 0: همان جهت مرجع اصلی 1: بر خلاف جهت مرجع اصلی صدها مکان: 0: بر اساس حداکثر فرکانس محدود کنید 1: محدودیت بر اساس فراوانی هزار مکان: 0: فرکانس. A+B ACC/DEC مرجع اصلی بافر منبع فرکانس نامعتبر است. 1: فرکانس A+B . ACC/DEC مرجع اصلی بافر منبع فرکانس معتبر است. ACC/DEC توسط P08.04 (زمان ACC 4) تعیین می شود. |
انتخاب کنترل PID | P09.13 |
| نقطه سوئیچ فرکانس پایین: 5.00 هرتز، نقطه سوئیچینگ فرکانس بالا: 10.00 هرتز (P09.04 مربوط به پارامتر فرکانس بالا است) و وسط درون یابی خطی بین این دو نقطه است. | ضریب p فرکانس پایین (Kp) | P09.14 |
| 0.0–1000.0s | زمان ACC/DEC دستور PID | P09.15 |
| 0.000–10.000s | زمان فیلتر خروجی PID | P09.16 |
| Reserved | P09.17 | |
| 0.00–10.00s | زمان انتگرال فرکانس پایین (Ti) | P09.18 |
| 0.00–10.00s | زمان دیفرانسیل فرکانس پایین (Td) | P09.19 |
| 0.00–P09.21 | نقطه فرکانس پایین برای سوئیچینگ پارامتر PID | P09.20 |
| P09.20–P00.04 | فرکانس بالا سوئیچینگ در مد PID | P09.21 |
| Reserved | P09.22– P09.28 |
گروه P14 – ارتباط سریال
| محدوده تنظیم: 1-247 وقتی master آدرس ارتباطی Slave را روی 0 می نویسد نشان میدهد آدرس پخش در یک قالب، تمامی slave های درمد باس قالب رو دریافت میکنند اما به آن پاسخ نمی دهد. آدرس های ارتباطی درشبکه های ارتباطی منحصر به فرد هستند. که اساس ارتباط نقطه به نقطه است. توجه: آدرس ارتباطی Slave را نمی توان روی 0 تنظیم کرد. |
آدرس استیشن | P14.00 |
| این پارامتر برای تنظیم نرخ انتقال داده بین سیستم اصلی و VFD استفاده می شود. 0: 1200BPS 1: 2400BPS 2: 4800BPS 3: 9600BPS 4: 19200BPS 5: 38400BPS 6: 57600BPS 6: 57600BPS توجه: نرخ baud rate تنظیم شده در VFD باید با میزان تنظیم شده در سیستم اصلی مطابقت داشته باشد. در غیر این صورت، ارتباط با شکست مواجه می شود. نرخ baud rate بیشتر نشان دهنده ارتباط سریعتر است. |
ارتباط baud rate | P14.01 |
| فرمت داده تنظیم شده در VFD باید با فرمت رایانه بالایی مطابقت داشته باشد. در غیر این صورت، ارتباط با شکست مواجه می شود. 0: No check (N, 8, 1) for RTU 1: Even check (E, 8, 1) for RTU 2: Odd check (O, 8, 1) for RTU 3: No check (N, 8, 2) for RTU 4: Even check (E, 8, 2) for RTU 5: Odd check (O, 8, 2) for RTU |
بررسی بیت داده ها | P14.02 |
| تاخیر پاسخ ارتباطی را نشان می دهد. یعنی فاصله زمانی که VFD دریافت داده ها را کامل می کند تا زمانی که داده های پاسخ را به رایانه بالایی ارسال می کند. اگر تاخیر پاسخ کوتاهتر از زمان پردازش یکسو کننده باشد، یکسو کننده پس از پردازش داده ها، داده های پاسخ را به رایانه بالایی ارسال می کند اگر تاخیر بیشتر از زمان پردازش یکسو کننده باشد یکسو کننده داده های پاسخ را به کامپیوتر بالایی ارسال نمی کند تا زمانی که به تاخیر برسد، اگرچه داده ها پردازش شده اند. |
تاخیر در پاسخگویی ارتباطی | P14.03 |
| وقتی پرارامتر روی 0.0 تنظیم می شود | زمان ارتباط timeout | P14.04 |
| وقتی پرارامتر روی 0.0 تنظیم می شود زمان قطع ارتباط نامعتبر است. وقتی کد تابع روی مقدار غیر صفر تنظیم می شود، سیستم “ایراد ارتباطی 485” را گزارش می کند (CE) اگر فاصله ارتباطی از مقدار بیشتر شود. به طور کلی، کد تابع روی 0.0 تنظیم شده است. زمانی که ارتباط مستمر مورد نیاز است می توانید کد عملکرد را برای نظارت بر وضعیت ارتباط تنظیم کنید. |
||
| 0: گزارش هشدارو متوقف شدن 1: بدون گزارش هشدار به حرکت ادامه دهد 2: توقف مطابق با حالت توقف بدون ایجاد آلارم (فقط در حالت کنترل مبتنی بر ارتباطات) 3: توقف مطابق با حالت توقف بدون ایجاد آلارم (در همه حالت های کنترل) |
پردازش خطای انتقال | P14.05 |
| تک مکانه 0: پاسخ به عملیات نوشتن 1:بدون پاسخ به عملیات نوشتن چند مکانه 0: حفاظت از رمز عبور نامعتبر است 1: حفاظت از رمز عبور معتبر است. |
اقدام پردازش ارتباطات | P14.06 |
| Reserved | P14.07– P14.09 | |
| : غیر فعال 1: فعال |
ارتقاء از راه دور | P14.10 |
| 0–655.35 | نسخه نرم افزار ارتقا از راه دور | P14.11 |
| Reserved | P14.12– P14.24 |
گروه P19– وضعیت کارت های توسعه
| 0: بدون کارت 1: کارت plc 2: کارت I/O (ورودی، خروجی) 3: Reserved 4: Reserved 5: Ethernet |
نوع کارت افزایشی اسلات 1 | P19.00 | |
| 6: DP 7: کارت Bluetooth 8: Reserved 9: کارت ارتباط CANopen 10: کارت WiFi 11: PROFINET 12: Reserved 13: Reserved 14: Reserved |
نوع کارت افزایشی اسلات 2 | P19.01 | |
| 15: کارت ارتباط CAN master/slave 16: کارت ارتباط Modbus 17: EtherCAT 18: کارت ارتباط BACnet 19: کارت ارتباط DeviceNet |
Reserved | P19.02 | |
| 0.00–655.35 | نسخه نرم افزار کارت در اسلات 1 | P19.03 | |
| 0.00–655.35 | نسخه نرم افزار کارت در اسلات 2 | P19.04 | |
| Reserved | P19.05 | ||
| 0–0xFFFF | وضعیت ورودی ترمینال کارت I/O | P19.06 | |
| 0–0xFFFF | وضعیت خروجی ترمینال کارت ورودی/خروجی | P19.07 | |
| 0.000–50.000kHz | فرکانس ورودی کارت ورودی/خروجی HDI3 | P19.08 | |
| 0.00–10.00V | ولتاژ ورودی کارت I/O AI3 | P19.09 | |
| Reserved | P19.10– P19.39 |
گروه P25 — توابع ورودی کارت I/O
| 0: HDI3 ورودی پالس با سرعت بالا 1: HDI3 ورودی دیجیتال |
ورودی نوع HDI3 | P25.00 | |
| توابع S5 | P25.01 | ||
| عملکرد S6 | P25.02 | ||
| عملکرد S7 | P25.03 | ||
| عملکرد S8 | P25.04 | ||
| Same as P05 | عملکرد S9 | P25.05 | |
| عملکرد S10 | P25.06 | ||
| عملکرد HDI3 | P25.07 | ||
| 0x00–0x7F | قطبیت ترمینال ورودی کارت انبساط | P25.08 | |
| BIT0: ترمینال مجازی S5 BIT1: ترمینال مجازی S6 BIT2: ترمینال مجازی S7 BIT3: ترمینال مجازی S8 BIT4: ترمینال مجازی S9 BIT5: ترمینال مجازی S10 BIT6: ترمینال مجازی HDI3 |
تنظیم ترمینال مجازی کارت توسعه | P25.09 | |
| تأخیر روشن شدن HDI3 | P25.10 | ||
| تاخیر خاموش شدن HDI3 | P25.11 | ||
| تاخیر روشن شدن S5 | P25.12 | ||
| برای تعیین زمان تاخیر مربوط به تغییرات سطح الکتریکی هنگام روشن یا خاموش شدن پایانه های ورودی قابل برنامه ریزی استفاده می شود. | تاخیر خاموش شدنS5 | P25.13 | |
| تاخیر روشن شدن S6 | P25.14 | ||
 |
تاخیر خاموش شدنS6 | P25.15 | |
| تاخیر روشن شدن S7 | P25.16 | ||
| تاخیر خاموش شدنS7 | P25.17 | ||
| تاخیر روشن شدن S8 | P25.18 | ||
| تاخیر خاموش شدنS8 | P25.19 | ||
| تاخیر روشن شدن S9 | P25.20 | ||
| تاخیر خاموش شدنS9 | P25.21 | ||
| تاخیر روشن شدنS10 | P25.22 | ||
| تاخیر خاموش شدن S10 | P25.23 |
گروه P26__عملکردهای خروجی کارت I/O
| 0: خروجی پالس پرسرعت کلکتور باز 1: خروجی کلکتور باز |
نوع خروجی HDO2 | P26.00 | |
| خروجی HDO2 | P26.01 | ||
| خروجی Y2 | P26.02 | ||
| خروجی Y3 | P26.03 | ||
| همانند توضیحات P06.01 | خروجی RO3 | P26.04 | |
| خروجی RO4 | P26.05 | ||
| خروجی RO5 | P26.06 | ||
| خروجی RO6 | P26.07 | ||
| خروجی RO7 | P26.08 | ||
| خروجی RO8 | P26.09 | ||
| خروجی RO9 | P26.10 | ||
| خروجی RO10 | P26.11 | ||
| 0x0000–0x7FF RO10، RO9…RO3، HDO2، Y3، Y2 به ترتیب |
قطبیت ترمینال خروجی کارت | P26.12 | |
| تأخیر روشن شدن HDO2 | P26.13 | ||
| برای تعیین زمان تاخیر مربوط به تغییرات سطح الکتریکی هنگام روشن یا خاموش شدن پایانه های خروجی قابل برنامه ریزی استفاده می شود. | تاخیر خاموش شدن HDO2 | P26.14 | |
| تأخیر روشن شدن Y2 | P26.15 | ||
 |
تاخیر خاموش شدن Y2 | P26.16 | |
| تأخیر روشن شدن Y3 | P26.17 | ||
| تاخیر خاموش شدن Y3 | P26.18 | ||
| تأخیر روشن شدن RO3 | P26.19 | ||
| تاخیر خاموش شدن RO3 | P26.20 | ||
| توجه: P26.13 و P26.14 فقط زمانی معتبر هستند P26.00 = 1. |
تاخیر روشن شدن RO4 | P26.21 | |
| تاخیر خاموش شدن RO4 | P26.22 | ||
| تاخیر روشن شدن RO5 | P26.23 | ||
| تاخیر خاموش شدن RO5 | P26.24 | ||
| تأخیر روشن شدن RO6 | P26.25 | ||
| تاخیر خاموش شدن RO6 | P26.26 | ||
| تاخیر روشن شدن RO7 | P26.27 | ||
| تاخیر خاموش شدن RO7 | P26.28 | ||
| تاخیر روشن شدن RO8 | P26.29 | ||
| تاخیر خاموش شدن RO8 | P26.30 | ||
| تأخیر روشن شدن RO9 | P26.31 | ||
| تاخیر خاموش شدن RO9 | P26.32 | ||
| تاخیر روشن شدن RO10 | P26.33 | ||
| تاخیر خاموش شدن RO10 | P26.34 | ||
| خروجی AO2 | P26.35 | ||
| همانند توضیحات P06.14 | خروجی AO3 | P26.36 | |
| Reserved | P26.37 |
گروه P93 – کنترل آتش
| 0: غیر فعال 1: Fire mode 1 2: Fire mode 2 وقتی P93.00=0، حالت آتش نامعتبر است VFD در حالت عادی کار می کند و در صورت بروز خطا متوقف می شود وقتی P93.00 یک مقدار غیر صفر است و سیگنال آتش فعال می شود، حالت آتش معتبر است و VFD با سرعت مشخص شده توسط P93.01 اجرا می شود اگر حالت آتش 1 انتخاب شده باشد، VFD همیشه کار می کند مگر اینکه آسیب دیده باشد اگر حالت آتش 2 انتخاب شده باشد، VFD همیشه اجرا می شود به جز اینکه با خطاهای زیر متوقف می شود: OUT1، OUT2، OUT3، OC1، OC2، OC3، OV1، OV2، OV3، و SPO.. |
حالت آتش Fire mode |
P93.00 | |
| 0.00Hz–P00.03 (حداکثر فرکانس خروجی) | فرکانس رانینگ در حالت آتش | P93.01 | |
| 0: ران در جهت پیش فرض 1: ران در جهت مخالف |
جهت موتور در حال کاردر حالت آتش | P93.02 | |
| اگر مدت زمان حالت آتش سوزی به 5 دقیقه برسد، این فلگ روی 1 تنظیم می شود و هیچ گارانتی تعمیر داده نمی شود. | Fire mode flag | P93.03 | |
| 01.01–12.31 | ماه و تاریخ واقعی فعال شدن آتش | P93.04 | |
| 00.00–23.59 | زمان واقعی فعال شدن آتش | P93.05 | |
| Reserved | P93.06– P93.09 |
راههای ارتباطی نیک صنعت:
- تماس با نیک صنعت: 87700210
- واحد فروش نیک صنعت: 09197872783
- واحد تعمیرات نیک صنعت: 09197872789
- ایمیل نیک صنعت: info@nicsanat.com
- آدرس شرکت: تهران، خیابان بهشتی، خیابان میرعماد، کوچه پیمانی (یازدهم)، پلاک 17



نظرات کاربران